在嵌入式系统和物联网(IoT)架构的复杂世界中,时间不仅仅是一个度量指标;它是一种基本的约束,决定了系统的稳定性。当多个线程或中断同时尝试访问共享资源时,就可能出现竞争条件。本指南将技术性地探讨如何使用时序图诊断此类同步问题。我们将研究并发执行的机制,分析信号转换,并确定逻辑偏离预期行为的精确时刻。
🧩 理解嵌入式系统中的并发性
物联网设备通常在严格的功耗和处理能力限制下运行。为了最大化效率,开发者经常实现并发进程。这意味着中央处理器(CPU)看似同时处理多个任务,例如传感器轮询、网络传输和执行器控制。然而,在单核微控制器中,真正的并行性很少见。相反,快速的上下文切换制造了同时发生的假象。
- 共享内存: 可被中断服务例程(ISR)和主循环同时访问的变量。
- 硬件外设: 用于UART、SPI或I2C通信的寄存器。
- 状态机: 根据外部触发信号进行状态转换的逻辑。
当这些元素在缺乏适当同步机制的情况下交互时,系统状态将变得不确定。当某个过程的结果取决于未保证按特定顺序发生的事件的相对时间时,就会发生竞争条件。
📊 时序图在调试中的作用 🛠️
时序图是信号在特定时间轴上的可视化表示。在调试的背景下,它充当一种取证工具。与静态代码审查不同,时序图能够捕捉硬件与软件交互的动态行为。它使工程师能够观察到延迟、抖动以及重叠的执行窗口。
时序图的关键组成部分
| 组件 | 描述 | 与竞争条件的相关性 |
|---|---|---|
| 时间轴 | 表示持续时间的水平线(纳秒、微秒、毫秒) | 确立事件的顺序 |
| 信号线 | 表示特定引脚或变量的垂直线 | 显示高/低电平状态或数据变化 |
| 转换 | 信号状态发生变化的边沿(上升沿/下降沿) | 指示中断的触发点 |
| 延迟标记 | 触发与响应之间的延迟 | 揭示处理瓶颈 |
🏭 案例研究场景:智能电能表
考虑一个用于测量电压和电流脉冲的物联网电能表。该设备必须将这些脉冲记录到非易失性存储器中,同时通过蜂窝模块向云网关发送摘要数据包。系统架构包括一个主应用程序循环和一个由电压阈值穿越触发的硬件中断。
系统规格
- 微控制器: 基于32位ARM Cortex-M4的处理器
- 共享资源: RAM中的一个4字节计数器变量
- 中断源: 外部电压比较器
- 主循环任务: 定期数据聚合与传输
预期逻辑很简单:当发生电压尖峰时,中断会增加计数器。主循环读取计数器,发送其值,然后将其重置为零。在正常负载下,这可以正常工作。然而,在高负载条件下,会出现数据损坏。
📈 分析信号流
为了诊断该问题,我们构建一个时序图,重点关注中断服务例程(ISR)与主循环之间的交互。该图展示了CPU的执行流程、共享计数器的信号状态以及外设数据总线的状态。
阶段1:读-修改-写周期
竞争条件的核心在于读-修改-写(RMW)序列。在许多架构上,该操作并非原子操作。它包含三个不同的步骤:
- 读取: CPU从内存中获取当前值。
- 修改: CPU将寄存器值加一。
- 写入: CPU将新值写回内存。
如果在步骤1和步骤3之间发生中断,数据的完整性将受到破坏。让我们分析该事件的时序图表示。
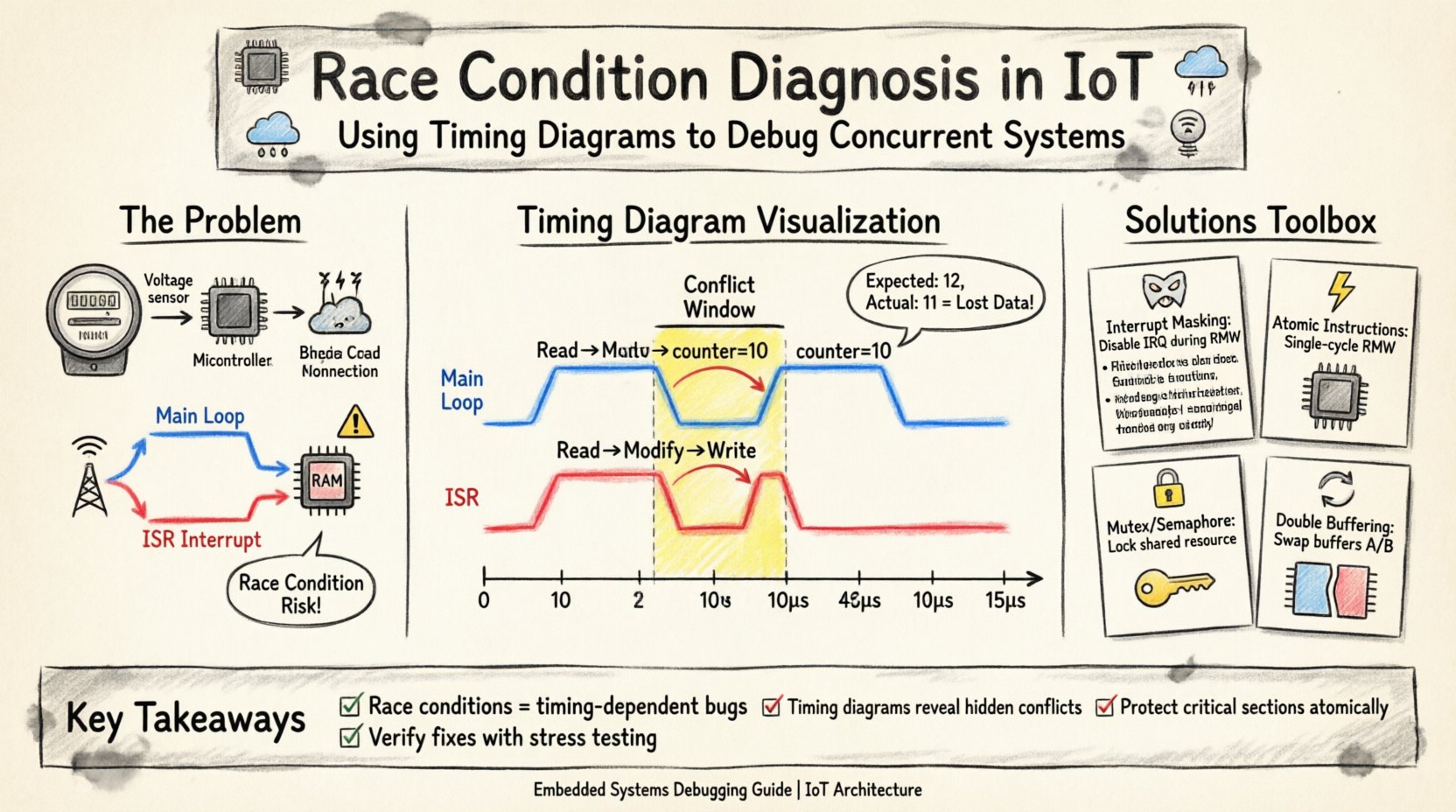
时序图可视化
| 时间(μs) | 主循环 | ISR | 共享计数器值 |
|---|---|---|---|
| 0 | 读取计数器(值:10) | 空闲 | 10 |
| 2 | 寄存器保存的值为10 | 中断触发 | 10 |
| 5 | 修改 (10 + 1 = 11) | 读取计数器 (值: 10) | 10 |
| 8 | 中断待处理 | 修改 (10 + 1 = 11) | 10 |
| 10 | 写入 (11) | 写入 (11) | 11 |
| 12 | 重置计数器 (0) | 返回中断 | 0 |
| 15 | 周期结束 | 返回主循环 | 0 |
注意最终值的差异。主循环和中断服务程序都读取了该值10。两者都加一,结果为11。主循环写入11,中断服务程序将其覆盖为11。最终结果是计数为11,而应为12。中断服务程序检测到的脉冲实际上丢失了,因为主循环正处于处理前一个计数的过程中。
🔍 识别冲突窗口
时序图使冲突窗口变得可见。这是主循环读取变量和写入新值之间的间隔。在此特定架构中,该周期大约为8微秒。只有当中断延迟短于这个窗口时,才会发生竞争条件。
影响窗口的因素
- 时钟频率:更高的频率会缩短读-修改-写(RMW)周期的物理时间。
- 内存延迟:SRAM或Flash中的等待状态会延长读/写时间。
- 编译器优化:内联或寄存器分配可能会改变指令的执行时间。
- 中断优先级: 如果中断优先级低于主循环中的临界区,则竞争条件可能被掩盖。
通过使用逻辑分析仪或片上性能监视器测量实际的时钟周期,工程师可以计算出确切的暴露窗口。这些数据对于判断简单的软件修复是否可行,或是否需要硬件干预至关重要。
🛡️ 解决方案策略
一旦通过时序分析确认了竞争条件,就需要进行特定的架构更改。目标是确保临界区(读-修改-写操作)能够原子执行,或免受中断影响。
1. 中断屏蔽
最直接的方法是在临界区禁用中断。这可以确保在主循环更新共享变量期间,没有中断服务例程(ISR)能够抢占主循环。
- 实现方法: 使用汇编指令在读取前清除中断使能标志,并在写入后重新设置。
- 优点:无需复杂的数据库结构即可保证原子性。
- 缺点: 会增加所有其他外设的中断延迟。高优先级中断可能被延迟,影响实时性能。
2. 原子指令
现代处理器通常提供对原子操作的硬件支持。这些指令在单个不可分割的机器周期内完成读-修改-写序列。
- 实现方法: 使用映射到原子比较并交换(CAS)或获取并增加指令的库函数或内联函数。
- 优点: 性能开销最小;无需禁用全局中断。
- 缺点: 依赖硬件;并非所有旧式微控制器都支持。
3. 软件锁定(互斥量/信号量)
对于更复杂的共享资源,例如通信缓冲区,需要使用锁定机制。这可以确保同一时间只有一个线程或进程访问该资源。
- 实现方式: 内存中一个表示资源正在被使用的标志。主循环检查该标志;中断服务例程在尝试访问前也检查该标志。
- 优点: 灵活性高;可实现任务优先级调度。
- 缺点: 引入上下文切换开销,并且若管理不当,可能导致死锁。
4. 双缓冲
在数据传输场景中,双缓冲可以消除写入阶段的同步需求。主循环向缓冲区A写入数据,而中断服务例程从缓冲区B读取数据。
- 实现方式: 维护两个独立的内存区域。当一个完整数据块准备就绪时,交换它们的指针。
- 优点: 防止传输过程中数据损坏;解耦了数据的生产与消费。
- 缺点: 内存使用量翻倍;需要仔细管理指针。
🔄 验证与测试
应用修复后,必须重新生成时序图以验证解决方案。目标是确认主循环与中断服务例程关键段之间的重叠已被消除。
测试协议
- 压力测试: 尽可能提高中断频率和主循环负载,以诱发最坏情况。
- 日志分析: 将计数器值与已知基准值(例如外部脉冲发生器)进行对比。
- 信号捕获: 在压力测试期间记录时序图,以确认冲突窗口不存在。
如果时序图显示中断服务例程在主循环访问变量之前已完全执行,或变量在切换期间被锁定,则竞争条件已解决。
📝 时序分析中的常见陷阱
即使有时序图,工程师仍可能误解数据。几种常见错误可能导致误报或漏报。
- 忽略抖动: 网络延迟或时钟漂移可能导致信号边沿发生轻微偏移。静态图表可能无法捕捉这种变化。
- 忽略电源模式: CPU 可能进入低功耗睡眠状态,从而改变指令执行时间和中断唤醒时间。
- 编译器差异: 不同的优化级别(-O0 与 -O2)可能会重新排列指令,从而改变临界区的精确执行时间。
- 硬件延迟: 外设延迟(例如 ADC 转换时间)通常不会反映在软件时序图中,但却会影响整个系统的状态。
🚀 诊断结论
诊断竞争条件需要从静态代码分析转向动态信号观察。时序图提供了必要的上下文,以理解时间如何与并发环境中的逻辑相互作用。通过将主循环的执行流程与中断服务例程进行对比,数据损坏的精确时刻便变得清晰可见。
有效的解决方案需要根据硬件能力与性能需求选择合适的同步策略。无论是通过原子指令、中断屏蔽,还是架构重构,目标始终一致:确保共享状态在任何执行时序下都保持一致。
随着物联网设备变得越来越复杂和互联,容错空间不断缩小。严格的时序分析不仅仅是调试步骤,更是构建可靠嵌入式系统开发周期中的关键组成部分。