W złożonym świecie systemów wbudowanych i projektowania cyfrowego stabilność logiki nie jest po prostu preferencją; jest wymaganiem. Firmware stanowi inteligencję ukrytą za krzemem, określającą sposób działania sprzętu wobec zewnętrznych bodźców. Jednak złożoność nowoczesnych mikrokontrolerów i specjalizowanych układów scalonych (ASIC) często prowadzi do subtelnych błędów, które trudno wykryć. Najbardziej skutecznym podejściem do minimalizacji tych problemów jest dyscyplinowane wykorzystanie dwóch podstawowych narzędzi: diagramów czasowych i skończonych maszyn stanów (FSM). Razem tworzą one rygorystyczny ramach do projektowania firmware, który jest przewidywalny, weryfikowalny i łatwy w utrzymaniu.
Zrozumienie związku między synchronizacją sygnałów a stanem logicznym jest kluczowe dla każdego inżyniera pracującego nad logiką sekwencyjną. Gdy te dwa pojęcia są zsynchronizowane, otrzymywany firmware zachowuje się spójnie przy zmianach temperatury, fluktuacjach napięcia i zmianach szybkości zegara. Niniejszy przewodnik omawia sposób wykorzystania tych narzędzi do tworzenia niezawodnej logiki firmware bez opierania się na zgadywaniu lub debugowaniu metodą prób i błędów.
📈 Podstawa: Zrozumienie diagramów czasowych
Diagram czasowy to graficzne przedstawienie zmian sygnałów w czasie. Jest to podstawowy język używany do komunikacji związków czasowych między komponentami sprzętu a procedurami firmware. W kontekście logiki firmware te diagramy działają jak umowa między środowiskiem sprzętowym a kodem, który na nim działa.
Kluczowe elementy diagramu czasowego
- Oś czasu: Reprezentuje postęp cykli zegarowych lub czasu absolutnego. Ustala rytm działania systemu.
- Linie sygnałowe: Poziome linie reprezentujące konkretne wejścia, wyjścia lub wewnętrzne flagi. Każda linia odpowiada jednemu bitowi lub grupie bitów.
- Krawędzie: Pionowe przejścia wskazujące na narastające krawędzie (od niskiego do wysokiego) lub opadające krawędzie (od wysokiego do niskiego). Często wywołują zmiany stanu.
- Stany wysokie/niskie: Poziomy logiczne utrzymywane pomiędzy przejściami, definiujące wartość danych w dowolnej chwili.
- Opóźnienia: Przerwy między zdarzeniami, takimi jak czas ustawienia, czas utrzymania lub opóźnienie propagacji, które określają minimalny czas potrzebny do stabilizacji.
Podczas projektowania firmware diagram czasowy odpowiada na pytanie: „Kiedy dane są ważne?” i „Kiedy system powinien reagować?” Bez tego wizualnego kontekstu projektowanie logiki staje się grą zgadywania. Na przykład, jeśli sygnał czujnika jest próbowany zbyt wcześnie, zanim się ustabilizuje, firmware odczyta dane zanieczyszczone. Jeśli zostanie próbowany zbyt późno, może całkowicie pominąć impuls.
Dlaczego diagramy czasowe są ważne w firmware
- Ujednolicenie ograniczeń sprzętowych: Wyraźnie pokazują czasy ustawienia i utrzymania wymagane przez urządzenia peripheralne.
- Środowisko do debugowania: Gdy system zawodzi, diagram czasowy stanowi podstawę do porównania oczekiwanego zachowania z rzeczywistym zachowaniem.
- Komunikacja: Są uniwersalnym dokumentem, na którym zespoły sprzętowe i programistyczne mogą się zgodzić na protokoły interfejsów.
- Optymalizacja: Pomagają wykryć zatory, w których oprogramowanie bez potrzeby czeka na sygnały sprzętowe.
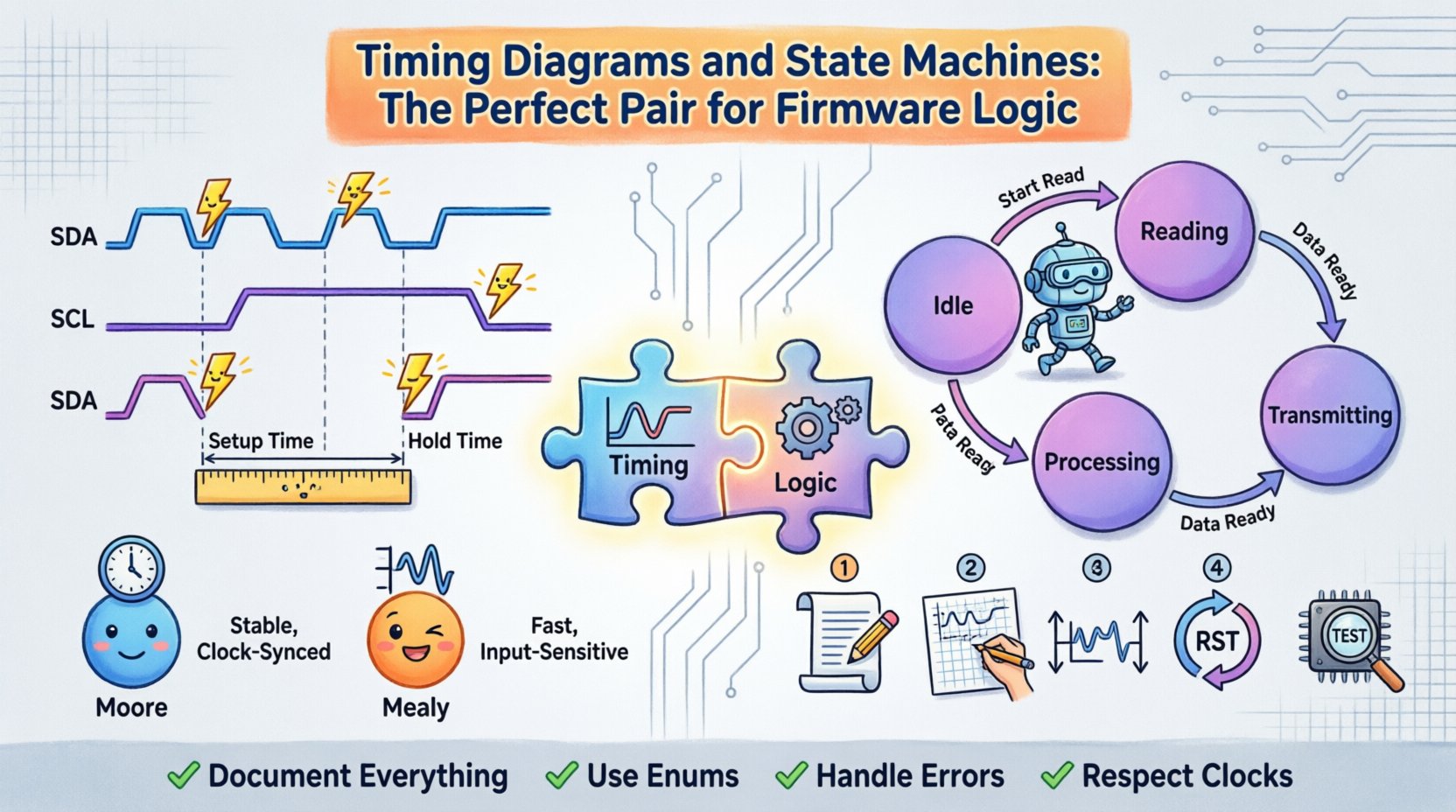
Rozważmy sytuację z interfejsem komunikacji I2C. Firmware musi czekać, aż linia zegarowa się ustabilizuje, zanim odczyta dane. Diagram czasowy wizualnie przedstawia linie SDA i SCL, pokazując dokładnie, gdzie występują warunek startowy, bajt adresu i bajt danych. Ta wizualizacja zapobiega warunkom wyścigu, gdyby oprogramowanie próbowało odczytać magistralę danych, gdy nadal master prowadzi zegar.
🔄 Silnik logiki: Skończone maszyny stanów (FSM)
Podczas gdy diagramy czasowe definiują środowisko, skończona maszyna stanów definiuje zachowanie. FSM to model obliczeń używany do projektowania zarówno programów komputerowych, jak i obwodów logicznych sekwencyjnych. Składa się z skończonej liczby stanów, przejść między tymi stanami oraz działań.
Składniki maszyny stanów
- Stan: Zrzut systemu w konkretnym momencie. Reprezentuje aktualny tryb działania (np. Nieczynność, Odczyt, Przetwarzanie, Przesyłanie).
- Przejście: Przejście od jednego stanu do drugiego na podstawie określonych warunków lub wejść.
- Wejście: Sygnały zewnętrzne lub wewnętrzne flagi, które wywołują zmianę stanu.
- Wyjście: Działania lub sygnały generowane podczas określonego stanu (Moore) lub podczas przejścia (Mealy).
Maszyny Moore vs. Mealy
Wybór odpowiedniego typu maszyny stanów to kluczowe decyzje projektowe. Wybór wpływa na wrażliwość czasową i stabilność wyjścia.
| Cecha | Maszyna Moore | Maszyna Mealy |
|---|---|---|
| Zależność wyjścia | Zależy wyłącznie od aktualnego stanu | Zależy od aktualnego stanu i wejścia |
| Stabilność czasowa | Bardziej stabilna; wyjścia zmieniają się tylko w chwili krawędzi zegara | Szybsza reakcja; wyjścia mogą zmieniać się natychmiast po zmianie wejścia |
| Złożoność | Może wymagać więcej stanów do obsłużenia określonych kombinacji wejść | Często wymaga mniej stanów dla tej samej funkcjonalności |
| Wrażliwość na zakłócenia | Mniej wrażliwa na zakłócenia wejściowe | Bardziej wrażliwa na zakłócenia wejściowe |
W logice firmware, gdzie integralność sygnału jest kluczowa, często preferowane są maszyny Moore. Ponieważ wyjścia są ściśle powiązane ze stanem i zazwyczaj synchronizowane z krawędzią zegara, zmniejszają one ryzyko rozprzestrzeniania się niezgodnych zakłóceń w systemie. Maszyny Mealy oferują szybszą odpowiedź, ale wymagają dokładnej analizy czasowej, aby zapewnić, że wejścia nie spowodują metastabilności.
🤝 Synchronizacja czasu i logiki
Prawdziwa siła tego połączenia polega na synchronizacji wykresu czasowego z logiką przejść maszyny stanów. Każde przejście w maszynie stanów musi odpowiadać ważnemu punktowi na wykresie czasowym. Jeśli sygnał sprzętowy zmienia się w chwili, która koliduje z cyklem zegara, firmware może wejść w stan niezdefiniowany.
Ustanawianie domeny zegara
Wszystkie przejścia stanów powinny idealnie następować na określonej krawędzi zegara (zazwyczaj rosnącej). Wykres czasowy musi pokazywać, że wszystkie sygnały wejściowe są stabilne w czasie ustalania przed krawędzią zegara i pozostają stabilne w czasie utrzymywania po krawędzi zegara. Logika firmware, która ignoruje te okna, ryzykuje pobranie niepoprawnych danych.
Aby zapewnić tę zgodność:
- Przypisz wejścia do cykli zegara: Dokładnie określ, w którym cyklu zegara zostanie pobrane wejście. Nie pobieraj wejścia dowolnie w ramach cyklu.
- Odfiltrowanie wejść:Przyciski mechaniczne lub szumne czujniki wymagają czasu na ustabilizowanie. Diagram czasowy powinien zawierać okna odfiltrowania, a maszyna stanów powinna mieć dedykowany stan „Czekanie”, aby obsłużyć ten okres.
- Unikaj łączenia zdarzeń asynchronicznych: Jeśli wystąpi przerwanie, musi zostać zsynchronizowane z zegarem systemowym przed wejściem do logiki maszyny stanów.
Obsługa wejść asynchronicznych
Nie wszystkie sygnały są zsynchronizowane z zegarem systemowym. Przerwania zewnętrzne, sygnały z czujników lub wejścia użytkownika mogą przyjść w dowolnym momencie. Gdy te sygnały oddziałują na maszynę stanów zegarowaną, diagram czasowy staje się zabezpieczeniem.
Standardową techniką jest zastosowanie synchronizatora wielostopniowego. Diagram czasowy powinien przedstawić sygnał przechodzący przez dwa lub więcej przerzutników, co pozwala mu się ustabilizować przed odczytaniem przez maszynę stanów. Zapobiega to metastabilności, stanowi, w którym sygnał nie jest ani logicznym 0, ani 1, co może spowodować zawieszenie lub awarię systemu.
🛠️ Przepływ implementacji
Tworzenie oprogramowania firmware przy użyciu tej skojarzonej metody wymaga zorganizowanego przepływu pracy. Pomijanie kroków często prowadzi do niestabilnego kodu, który jest trudny do utrzymania. Poniższe kroki przedstawiają profesjonalną metodologię integracji diagramów czasowych i maszyn stanów.
1. Zdefiniuj protokół i ograniczenia
Zanim napiszesz jedną linię kodu, zapisz wymagania czasowe. Stwórz diagram czasowy przedstawiający idealne zachowanie. Uwzględnij minimalne szerokości impulsów, maksymalne czasy odpowiedzi oraz stany bezczynności. Ten dokument stanowi źródło prawdy dla logiki firmware.
2. Projektuj topologię maszyny stanów
Narysuj diagram stanów. Zidentyfikuj wszystkie możliwe stany oraz warunki wymagane do przejścia między nimi. Upewnij się, że każdy stan ma zdefiniowany warunek wyjścia. Unikaj stanów „sierot”, w których system może się zawiesić na zawsze.
3. Przypisz logikę do czasu
Wyrównaj przejścia stanów do krawędzi zegara zdefiniowanych w diagramie czasowym. Na przykład, jeśli maszyna stanów musi czekać 10 milisekund, oblicz, ile cykli zegara to odpowiada przy bieżącej częstotliwości systemu. Zaimplementuj to jako licznik wewnątrz stanu, a nie jako pętlę opóźnienia w oprogramowaniu blokującą procesor.
4. Zaimplementuj logikę resetu
Solidne oprogramowanie firmware musi powrócić do znanego stanu po zresetowaniu. Diagram czasowy powinien wskazywać czas trwania sygnału resetu. Kod inicjalizacji maszyny stanów musi zapewnić, że system zaczyna działanie w zdefiniowanym stanie „Bezczynność” lub „Gotowość”, niezależnie od sekwencji włączania zasilania.
5. Weryfikacja i symulacja
Symuluj logikę względem diagramu czasowego. Sprawdź naruszenia, w których oprogramowanie zakłada, że sygnał jest ważny, choć nie jest. Poszukaj warunków wyścigu, gdy stan zmienia się szybciej niż sprzęt może na to odpowiedzieć. Użyj ogólnych środowisk symulacji do modelowania zachowania sprzętu i weryfikacji logiki firmware względem ograniczeń czasowych.
🔍 Debugowanie i weryfikacja
Nawet przy starannym planowaniu pojawiają się problemy. Gdy logika firmware zawiedzie, połączenie diagramów czasowych i maszyn stanów zapewnia skuteczną strategię debugowania. Zamiast losowego logowania, użyj tych narzędzi do izolacji punktu awarii.
Typowe naruszenia czasowe
- Naruszenie czasu przygotowania: Wejście danych zmieniło się zbyt blisko krawędzi zegara. Firmware odczytuje niestabilne dane. Rozwiązanie: Przesuń punkt pobierania w maszynie stanów na późniejszy cykl.
- Naruszenie czasu utrzymania: Wejście danych zmieniło się zbyt wcześnie po krawędzi zegara. Przerzutnik traci poprzedni stan. Rozwiązanie: Dodaj buforowanie lub opóźnienie w ścieżce sprzętowej.
- Metastabilność: Sygnał jest nieokreślony. System może działać nieprzewidywalnie. Rozwiązanie: Zaimplementuj odpowiedni dwustopniowy synchronizator.
Błędy maszyny stanów
- Nieosiągalne stany:Stany, do których nie można wejść ani z których nie można wyjść. Zazwyczaj wskazują na błędy logiki w warunkach przejścia.
- Zafałszowane przejścia:System wchodzi w stan, do którego nie powinien wejść z powodu szumu. Rozwiązanie: Dodaj weryfikację wejścia lub stany wygładzające.
- Nieskończone pętle:System pozostaje w jednym stanie przez całe życie. Rozwiązanie: Upewnij się, że wszystkie stany mają limit czasu lub warunek wyjścia.
Korzystanie z diagramu do analizy przyczyn pierwotnych
Gdy występuje błąd, nakładaj rzeczywiste ślady sygnałów na idealny diagram czasowy. Szukaj odchyleń. Czy sygnał wejściowy przybył późno? Czy zegar był niestabilny? Czy maszyna stanów przeszła do następnego stanu zbyt wcześnie? To wizualne porównanie znacznie ogranicza przestrzeń poszukiwań w porównaniu do czytania surowych logów kodu.
📊 Najlepsze praktyki dla niezawodnej logiki
Aby utrzymać wysoką jakość i niezawodność na przestrzeni całego cyklu projektu, przestrzegaj tych najlepszych praktyk. Te wytyczne pomagają uniknąć zadłużenia technicznego i zapewniają, że firmware pozostaje elastyczny.
- Dokumentuj wszystko: Zachowuj diagramy czasowe i diagramy stanów aktualne wraz z kodem. Używana dokumentacja jest gorsza niż brak dokumentacji.
- Trzymaj stany proste: Unikaj skomplikowanych maszyn stanów z zbyt wieloma gałęziami. Jeśli maszyna ma więcej niż 10 stanów, rozważ podział na podmaszyny.
- Używaj jawnych wyliczeń: Definiuj nazwy stanów jako stałe lub wyliczenia. Unikaj używania tajemniczych liczb, takich jak „if (state == 3)”. Używaj „if (state == STATE_IDLE)”.
- Obsługuj błędy zgodnie z zasadami: Włącz stan „Błąd”. Jeśli system wykryje nieprawidłowe warunki, przejdź do tego stanu i zatrzymaj działanie lub zresetuj system, zamiast kontynuować działanie z niezdefiniowaną logiką.
- Uwzględniaj domeny zegarowe: Jeśli system używa wielu częstotliwości zegarów, zaimplementuj odpowiednie techniki przekraczania domen zegarowych. Nigdy nie przenosz danych bezpośrednio między asynchronicznymi zegarami.
- Minimalizuj blokujące opóźnienia: Nie używaj pętli „while”, które czekają na upływ czasu. Użyj maszyny stanów do zarządzania czasem za pomocą liczników, pozwalając procesorowi na wykonywanie innych zadań.
🔗 Przykład zastosowania w świecie rzeczywistym
Rozważ prosty system zarządzania baterią. Firmware monitoruje napięcie, kontroluje prąd ładowania i komunikuje stan z komputerem głównym.
Stan 1: Pusta. System czeka na sygnał żądania ładowania. Diagram czasowy pokazuje, że ten sygnał musi być wysoki co najmniej przez 5 milisekund.
Stan 2: Ładowanie. Po otrzymaniu poprawnego żądania system wchodzi w stan ładowania. Stan zegara zapewnia, że prąd płynie przez określony czas. Jeśli napięcie przekroczy limit, system przechodzi do “Stan 3: Ochrona przed przepięciem.
Stan 3: Ochrona. Obwód ładowania jest wyłączony. System czeka, aż napięcie spadnie poniżej bezpiecznego progu, zanim wróci do stanu gotowości. Diagram czasowy zapewnia, że czujnik napięcia jest próbowany tylko po fizycznym odłączeniu obciążenia przez sprzęt ochronny.
Bez maszyny stanów kod mógłby sprawdzać napięcie w pętli ciągłej. Jeśli napięcie chwilowo wzrośnie, pętla mogłaby zareagować zbyt szybko, powodując drgania. Dzięki maszynie stanów przejście do stanu Ochrona wymaga stabilnego stanu przez określony czas, zapobiegając fałszywym sygnałom.
🚀 Do przodu
Zintegrowanie diagramów czasowych i maszyn stanów to nie tylko wybór projektowy; to dyscyplina, która rozdziela kod działający od gotowego do produkcji firmware. Definiując wizualnie ograniczenia czasowe i strukturalnie określając przepływ logiczny, inżynierowie tworzą systemy odpornościowe na szum, zmiany sprzętowe i obciążenia operacyjne.
Ten podejście wymaga wysiłku na wstępie. Wymaga czasu na rysowanie diagramów i planowanie stanów przed rozpoczęciem kodowania. Jednak koszt debugowania warunku wyścigu w polu znacznie przekracza koszt poprawnego zaprojektowania go od początku. W miarę zwiększania się złożoności systemów rośnie potrzeba stosowania tej strukturalnej metodyki. Nie ma skrótu do niezawodności. Droga do przodu polega na ciągłej dokumentacji, surowej weryfikacji i szacunku dla ograniczeń czasowych świata fizycznego.
Przyjęcie tych praktyk zapewnia, że logika firmware pozostaje przejrzysta i testowalna. Pozwala zespołom skutecznie współpracować, wiedząc, że diagramy czasowe definiują rzeczywistość, w której działają maszyny stanów. W branży, gdzie sprzęt jest kosztowny, a czas wydania na rynek krytyczny, to połączenie oferuje najlepsze szanse na sukces.
✅ Kluczowe wnioski
- Diagramy czasowe zapewniają wizualny kontrakt dotyczący zachowania sygnału w czasie.
- Maszyny stanów zapewniają strukturalną logikę zachowania systemu.
- Synchronizacja to kluczowy element łączący oba narzędzia.
- Maszyny Moore oferują lepszą stabilność czasową niż maszyny Mealy w większości zadań wbudowanych.
- Debugowanie jest najskuteczniejsze, gdy rzeczywiste ślady są porównywane z idealnym diagramem czasowym.
- Dokumentacja musi ewoluować wraz z kodem, aby pozostać użyteczna.
Przestrzegając tych zasad, inżynierowie firmware mogą tworzyć logikę, która wytrzyma próbę czasu, zapewniając stabilność w coraz bardziej złożonym świecie cyfrowym.