In der komplexen Welt von eingebetteten Systemen und digitaler Schaltungstechnik ist Logikstabilität keine bloße Präferenz; sie ist eine Voraussetzung. Die Firmware fungiert als Intelligenz hinter dem Silizium und bestimmt, wie die Hardware auf externe Reize reagiert. Die Komplexität moderner Mikrocontroller und anwendungsspezifischer integrierter Schaltungen (ASICs) führt jedoch oft zu subtilen Fehlern, die schwer nachzuverfolgen sind. Der robusteste Ansatz zur Minderung dieser Probleme liegt in der disziplinierten Anwendung zweier grundlegender Werkzeuge: Zeitdiagrammen und endlichen Zustandsmaschinen (FSMs). Zusammen bilden sie ein strenges Rahmenwerk für die Entwicklung von Firmware, die vorhersehbar, überprüfbar und wartbar ist.
Das Verständnis der Beziehung zwischen Signalzeitverläufen und logischen Zuständen ist entscheidend für jeden Ingenieur, der an sequenzieller Logik arbeitet. Wenn diese beiden Konzepte abgestimmt sind, verhält sich die resultierende Firmware konsistent bei Temperaturänderungen, Spannungsschwankungen und Änderungen der Taktfrequenz. Dieser Leitfaden untersucht, wie diese Werkzeuge genutzt werden können, um zuverlässige Firmware-Logik zu entwickeln, ohne auf Vermutungen oder versuchsweises Debugging angewiesen zu sein.
📈 Die Grundlage: Verständnis von Zeitdiagrammen
Ein Zeitdiagramm ist eine grafische Darstellung, wie Signale im Laufe der Zeit wechseln. Es ist die primäre Sprache, um zeitliche Beziehungen zwischen Hardwarekomponenten und Firmware-Routinen zu kommunizieren. Im Kontext von Firmware-Logik fungieren diese Diagramme als Vertrag zwischen der Hardwareumgebung und dem darauf ausgeführten Code.
Wichtige Elemente eines Zeitdiagramms
- Zeitachse:Stellt den Ablauf von Taktzyklen oder absoluter Zeit dar. Sie legt das Rhythmus fest, nach dem das System arbeitet.
- Signalleitungen:Horizontale Linien, die spezifische Eingänge, Ausgänge oder interne Flags darstellen. Jede Linie entspricht einem Bit oder einer Bitgruppe.
- Kanten:Vertikale Übergänge, die steigende Kanten (von niedrig nach hoch) oder fallende Kanten (von hoch nach niedrig) anzeigen. Diese lösen häufig Zustandsänderungen aus.
- Hoch/Niedrig-Zustände:Die logischen Pegel, die zwischen Übergängen aufrechterhalten werden, und die den Datenwert zu jedem beliebigen Zeitpunkt definieren.
- Verzögerungen:Lücken zwischen Ereignissen, wie Setup-Zeit, Hold-Zeit oder Propagierungsverzögerung, die die minimale Zeit für Stabilität festlegen.
Beim Entwurf von Firmware beantwortet ein Zeitdiagramm die Frage: „Wann ist Daten gültig?“ und „Wann sollte das System reagieren?“ Ohne diesen visuellen Kontext wird die Logikgestaltung zu einem Ratespiel. Zum Beispiel liest die Firmware bei einer zu frühen Abtastung eines Sensorsignals, bevor es sich stabilisiert hat, Müll-Daten. Bei einer zu späten Abtastung könnte sie einen Impuls vollständig verpassen.
Warum Zeitdiagramme in der Firmware wichtig sind
- Klärung von Hardware-Beschränkungen:Sie zeigen explizit die für Peripheriegeräte erforderlichen Setup- und Hold-Zeiten an.
- Debugging-Referenz:Wenn ein System ausfällt, liefert ein Zeitdiagramm eine Grundlage für den Vergleich des erwarteten Verhaltens mit dem tatsächlichen Verhalten.
- Kommunikation:Sie dienen als universelles Dokument, damit Hardware- und Software-Teams sich auf Schnittstellenprotokolle einigen können.
- Optimierung:Sie helfen dabei, Engpässe zu identifizieren, an denen die Software unnötig auf Hardware-Signale wartet.
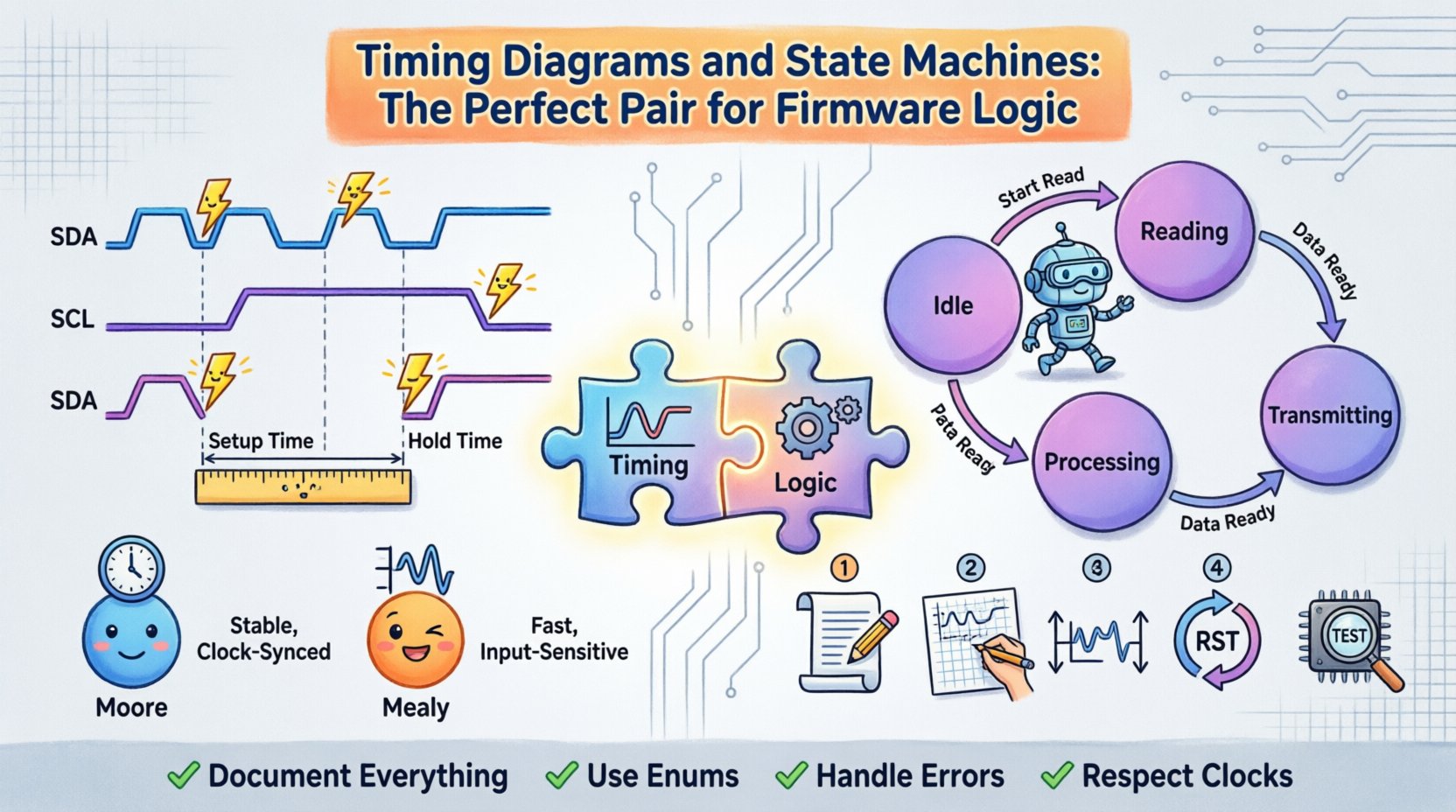
Betrachten Sie eine Situation mit einer I2C-Kommunikationsschnittstelle. Die Firmware muss warten, bis die Taktsignalleitung stabilisiert ist, bevor sie Daten liest. Ein Zeitdiagramm zeigt visuell die SDA- und SCL-Leitungen auf, wobei genau angezeigt wird, wo die Startbedingung, die Adressbyte und die Datenbyte auftreten. Diese Visualisierung verhindert Rennbedingungen, bei denen die Software versuchen könnte, die Datenleitung zu lesen, während der Master noch den Takt treibt.
🔄 Die Logikmaschine: Endliche Zustandsmaschinen (FSMs)
Während Zeitdiagramme die Umgebung definieren, definiert die endliche Zustandsmaschine das Verhalten. Eine FSM ist ein Berechnungsmodell, das zur Gestaltung sowohl von Computerprogrammen als auch von sequenziellen Logikschaltungen verwendet wird. Sie besteht aus einer endlichen Anzahl von Zuständen, Übergängen zwischen diesen Zuständen und Aktionen.
Bestandteile einer Zustandsmaschine
- Zustand: Ein Schnappschuss des Systems zu einem bestimmten Zeitpunkt. Er stellt den aktuellen Betriebszustand dar (z. B. Leerlauf, Lesen, Verarbeiten, Übertragen).
- Übergang: Die Bewegung von einem Zustand zum anderen basierend auf bestimmten Bedingungen oder Eingaben.
- Eingabe: Externe Signale oder interne Flags, die einen Zustandswechsel auslösen.
- Ausgabe: Aktionen oder Signale, die während eines bestimmten Zustands (Moore) oder während eines Übergangs (Mealy) erzeugt werden.
Moore- vs. Mealy-Maschinen
Die Auswahl der richtigen Art von Zustandsmaschine ist eine entscheidende Entwurfsentscheidung. Die Wahl beeinflusst die Zeitempfindlichkeit und die Stabilität der Ausgabe.
| Funktion | Moore-Maschine | Mealy-Maschine |
|---|---|---|
| Ausgabehängigkeit | Hängt nur vom aktuellen Zustand ab | Hängt vom aktuellen Zustand und der Eingabe ab |
| Zeitstabilität | Stabiler; Ausgaben ändern sich nur am Taktflankenausgang | Schneller Reaktionszeit; Ausgaben können sofort mit der Eingabe ändern |
| Komplexität | Kann mehr Zustände erfordern, um bestimmte Eingabekombinationen zu behandeln | Erfordert oft weniger Zustände für die gleiche Funktionalität |
| Empfindlichkeit gegenüber Störimpulsen | Weniger empfindlich gegenüber Eingabestörungen | Empfindlicher gegenüber Eingabestörungen |
Für Firmware-Logik, bei der die Signalintegrität entscheidend ist, werden Moore-Maschinen oft bevorzugt. Da die Ausgaben streng an den Zustand gebunden sind und typischerweise am Taktflankenaustritt synchronisiert werden, verringern sie das Risiko, dass asynchrone Störimpulse durch das System propagieren. Mealy-Maschinen bieten Geschwindigkeit, erfordern aber eine sorgfältige Zeitplanungsanalyse, um sicherzustellen, dass Eingaben keine Metastabilität verursachen.
🤝 Synchronisieren von Zeitplanung und Logik
Die wahre Stärke dieser Kombination liegt in der Synchronisation des Zeitplans mit der Übergangslogik der Zustandsmaschine. Jeder Übergang in der Zustandsmaschine muss einem gültigen Punkt im Zeitplan entsprechen. Wenn das Hardware-Signal zu einem Zeitpunkt ändert, der mit dem Taktzyklus kollidiert, kann die Firmware in einen undefinierten Zustand geraten.
Etablieren des Taktbereichs
Alle Zustandsübergänge sollten idealerweise an einer bestimmten Taktflanke (üblicherweise der steigenden Flanke) erfolgen. Der Zeitplan muss zeigen, dass alle Eingabesignale während der Setup-Zeit vor der Taktflanke stabil sind und während der Hold-Zeit nach der Taktflanke stabil bleiben. Firmware-Logik, die diese Zeiträume ignoriert, riskiert das Abtasten falscher Daten.
Um diese Ausrichtung sicherzustellen:
- Weisen Sie Eingaben auf Taktschritte zu:Definieren Sie genau, in welchem Taktschritt eine Eingabe abgetastet wird. Tasten Sie eine Eingabe nicht willkürlich innerhalb eines Taktschritts ab.
- Entprellen Sie Eingaben:Mechanische Schalter oder störanfällige Sensoren benötigen Zeit, um sich zu stabilisieren. Das Zeitdiagramm sollte Entprellfenster enthalten, und der Zustandsautomat sollte einen dedizierten „Warten“-Zustand haben, um diese Phase zu behandeln.
- Vermeiden Sie die Kombination asynchroner Ereignisse:Wenn ein Interrupt auftritt, muss er vor dem Eintritt in die Zustandsautomatenlogik auf den Systemtakt synchronisiert werden.
Behandlung asynchroner Eingaben
Nicht alle Signale sind synchron zum Systemtakt. Externe Interrupts, Sensortriggern oder Benutzereingaben können zu beliebigen Zeiten eintreffen. Wenn diese Signale mit einem getakteten Zustandsautomaten interagieren, wird das Zeitdiagramm zur Sicherheitsnetz.
Die Standardtechnik verwendet einen mehrstufigen Synchronisierer. Das Zeitdiagramm sollte zeigen, wie das Signal durch zwei oder mehr Flip-Flops läuft, damit es sich vor der Leseoperation durch den Zustandsautomaten stabilisiert. Dadurch wird Metastabilität verhindert, ein Zustand, in dem das Signal weder logisch 0 noch 1 ist, was dazu führen kann, dass das System hängen bleibt oder abstürzt.
🛠️ Implementierungsablauf
Die Entwicklung von Firmware mit diesem kombinierten Ansatz erfordert einen strukturierten Ablauf. Das Überspringen von Schritten führt oft zu zerbrechlichem Code, der schwer zu pflegen ist. Die folgenden Schritte skizzieren eine professionelle Methode zur Integration von Zeitdiagrammen und Zustandsautomaten.
1. Protokoll und Einschränkungen definieren
Bevor Sie eine einzige Codezeile schreiben, dokumentieren Sie die Zeitbedingungen. Erstellen Sie ein Zeitdiagramm, das das ideale Verhalten darstellt. Fügen Sie minimale Pulsbreiten, maximale Antwortzeiten und Ruhezustände hinzu. Dokument dieses Dokument als Quelle der Wahrheit für die Firmware-Logik.
2. Topologie des Zustandsautomaten entwerfen
Zeichnen Sie das Zustandsdiagramm. Identifizieren Sie alle möglichen Zustände und die Bedingungen, die zum Übergang zwischen ihnen erforderlich sind. Stellen Sie sicher, dass jeder Zustand eine definierte Ausgangsbedingung hat. Vermeiden Sie „verwaiste“ Zustände, in denen das System unbegrenzt stecken bleiben könnte.
3. Logik auf Zeitplan abbilden
Richten Sie die Zustandsübergänge an den im Zeitdiagramm definierten Takträndern aus. Wenn beispielsweise ein Zustandsautomat eine 10-Millisekunden-Verzögerung warten muss, berechnen Sie, wie viele Taktschritte dies bei der aktuellen Systemfrequenz entspricht. Implementieren Sie dies als Zähler innerhalb des Zustands, anstatt eine Softwareverzögerungsschleife, die den Prozessor blockiert.
4. Zurücksetzungslogik implementieren
Eine robuste Firmware muss beim Zurücksetzen in einen bekannten Zustand zurückkehren. Das Zeitdiagramm sollte die Dauer des Zurücksetzsignals angeben. Der Initialisierungscode des Zustandsautomaten muss sicherstellen, dass das System unabhängig von der Stromversorgungssequenz im definierten „Wartezustand“ oder „Bereit“-Zustand startet.
5. Überprüfung und Simulation
Simulieren Sie die Logik anhand des Zeitdiagramms. Prüfen Sie auf Verstöße, bei denen die Software annimmt, dass ein Signal gültig ist, obwohl es das nicht ist. Suchen Sie nach Rennbedingungen, bei denen der Zustand schneller wechselt, als das Hardware reagieren kann. Verwenden Sie generische Simulationsumgebungen, um das Hardwareverhalten zu modellieren und die Firmware-Logik anhand der Zeitbedingungen zu überprüfen.
🔍 Debugging und Überprüfung
Selbst bei sorgfältiger Planung treten Probleme auf. Wenn die Firmware-Logik fehlschlägt, bietet die Kombination aus Zeitdiagrammen und Zustandsautomaten eine leistungsstarke Debugging-Strategie. Verwenden Sie diese Werkzeuge anstelle von zufälligen Protokollen, um den Fehlerort zu isolieren.
Häufige Zeitverstöße
- Setup-Zeit-Verstoß:Der Dateninput änderte sich zu nahe am Taktrand. Die Firmware liest instabile Daten. Lösung: Verschieben Sie den Abtastpunkt im Zustandsautomaten auf einen späteren Zyklus.
- Hold-Zeit-Verstoß:Der Dateninput änderte sich zu früh nach dem Taktrand. Der Flip-Flop verliert den vorherigen Zustand. Lösung: Fügen Sie Pufferung oder Verzögerung in den Hardwarepfad ein.
- Metastabilität: Das Signal ist nicht aufgelöst. Das System kann sich unvorhersehbar verhalten. Lösung: Implementieren Sie einen ordnungsgemäßen Zweistufen-Synchronisierer.
Zustandsmaschinen-Fehler
- Unerreichbare Zustände:Zustände, die nicht betreten oder verlassen werden können. Dies weist meist auf Logikfehler in den Übergangsbedingungen hin.
- Falsche Übergänge:Das System gelangt aufgrund von Störungen in einen Zustand, in den es nicht gelangen sollte. Lösung: Fügen Sie Eingabebestätigung oder Entprellzustände hinzu.
- Endlose Schleifen:Das System bleibt für immer in einem Zustand. Lösung: Stellen Sie sicher, dass alle Zustände über einen Zeitlimit oder eine Ausgangsbedingung verfügen.
Verwendung des Diagramms zur Ursachenanalyse
Wenn ein Fehler auftritt, überlagern Sie die tatsächlichen Signalverläufe dem idealen Zeitdiagramm. Suchen Sie nach Abweichungen. Ist das Eingangssignal zu spät eingetroffen? Gab es Taktschwankungen? Ist der Zustandsautomat vorzeitig gewechselt? Diese visuelle Vergleichsmethode verengt den Suchraum erheblich gegenüber dem Lesen von Roh-Code-Protokollen.
📊 Best Practices für robuste Logik
Um hohe Qualität und Zuverlässigkeit über die gesamte Lebensdauer eines Projekts zu gewährleisten, halten Sie sich an diese Best Practices. Diese Richtlinien helfen, technischen Schulden vorzubeugen und sicherzustellen, dass die Firmware anpassungsfähig bleibt.
- Dokumentieren Sie alles:Halten Sie die Zeitdiagramme und Zustandsdiagramme zusammen mit dem Code aktuell. Veraltete Dokumentation ist schlimmer als keine Dokumentation.
- Halten Sie die Zustände einfach:Vermeiden Sie komplexe Zustandsmaschinen mit zu vielen Verzweigungen. Wenn eine Maschine mehr als 10 Zustände hat, überlegen Sie, sie in Teilmaschinen aufzuteilen.
- Verwenden Sie explizite Aufzählungen:Definieren Sie Zustandsnamen als Konstanten oder Aufzählungen. Vermeiden Sie magische Zahlen wie „if (state == 3)“. Verwenden Sie stattdessen „if (state == STATE_IDLE)“.
- Behandeln Sie Fehler abwartend:Schließen Sie einen „Fehler“-Zustand ein. Wenn das System eine ungültige Bedingung erkennt, wechseln Sie in diesen Zustand und stoppen oder setzen Sie zurück, anstatt mit undefinierter Logik weiterzumachen.
- Respektieren Sie Taktbereiche: Wenn das System mehrere Taktfrequenzen verwendet, implementieren Sie geeignete Techniken für den Übergang zwischen Taktbereichen. Bewegen Sie niemals Daten direkt zwischen asynchronen Taktquellen.
- Minimieren Sie blockierende Verzögerungen:Verwenden Sie keine „while“-Schleifen, die auf die Zeit warten. Verwenden Sie den Zustandsautomaten zur Zeitverwaltung mit Zählern, damit der Prozessor andere Aufgaben bearbeiten kann.
🔗 Beispiel aus der Praxis
Betrachten Sie ein einfaches Batteriemanagementsystem. Die Firmware überwacht die Spannung, steuert den Ladestrom und kommuniziert den Status an einen Host-Computer.
Zustand 1: Ruhezustand.Das System wartet auf ein Ladeanforderungssignal. Das Zeitdiagramm zeigt, dass dieses Signal mindestens 5 Millisekunden hoch sein muss.
Zustand 2: Laden.Bei einer gültigen Anforderung geht das System in den Ladezustand über. Ein Timerzustand stellt sicher, dass der Strom für eine bestimmte Dauer fließt. Wenn die Spannung die Grenze überschreitet, wechselt das System zu “Zustand 3: Überspannungs-Schutz.
Zustand 3: Schutz. Die Ladeeinrichtung ist deaktiviert. Das System wartet, bis die Spannung unter einen sicheren Schwellenwert fällt, bevor es in den Ruhezustand zurückkehrt. Ein Zeitdiagramm stellt sicher, dass der Spannungssensor erst nach der physischen Trennung der Last durch die Schutzhardware abgefragt wird.
Ohne den Zustandsautomaten könnte der Code die Spannung in einer kontinuierlichen Schleife überprüfen. Wenn die Spannung kurzfristig ansteigt, könnte die Schleife zu schnell reagieren und Oszillationen verursachen. Mit dem Zustandsautomaten erfordert der Übergang in den Schutzzustand eine stabile Bedingung über einen längeren Zeitraum, wodurch falsche Auslöseungen vermieden werden.
🚀 Vorwärtsbewegung
Die Integration von Zeitdiagrammen und Zustandsautomaten ist nicht nur eine Gestaltungsoption; es ist eine Disziplin, die funktionale Code von produktionsreifen Firmware trennt. Durch die visuelle Definition der zeitlichen Einschränkungen und die strukturelle Definition des logischen Ablaufs schaffen Ingenieure Systeme, die robust gegenüber Störungen, Hardware-Variationen und Betriebsbeanspruchung sind.
Dieser Ansatz erfordert Aufwand von vornherein. Es wird Zeit benötigt, Diagramme zu zeichnen und Zustände vor Beginn der Programmierung zu planen. Doch die Kosten für das Debuggen einer Rennbedingung vor Ort übersteigen bei weitem die Kosten für eine korrekte ursprüngliche Gestaltung. Je komplexer die Systeme werden, desto größer wird die Notwendigkeit für diese strukturierte Methodik. Es gibt keinen Kurzweg zur Zuverlässigkeit. Der Weg vorwärts erfordert kontinuierliche Dokumentation, strenge Überprüfung und Respekt vor den zeitlichen Beschränkungen der physischen Welt.
Die Einführung dieser Praktiken stellt sicher, dass die Firmware-Logik transparent und testbar bleibt. Es ermöglicht Teams, effektiv zusammenzuarbeiten, da sie wissen, dass die Zeitdiagramme die Realität definieren, in der die Zustandsautomaten arbeiten. In einer Branche, in der Hardware teuer ist und die Markteinführungszeit entscheidend ist, bietet diese Kombination die besten Chancen auf Erfolg.
✅ Wichtige Erkenntnisse
- Zeitdiagramme stellen den visuellen Vertrag für das Signalverhalten über die Zeit dar.
- Zustandsautomaten bieten die strukturierte Logik für das Systemverhalten.
- Die Synchronisation ist die entscheidende Verbindung zwischen den beiden Werkzeugen.
- Moore-Automaten bieten für die meisten eingebetteten Aufgaben eine bessere zeitliche Stabilität als Mealy-Automaten.
- Das Debuggen ist am effektivsten, wenn tatsächliche Trace-Aufzeichnungen mit dem idealen Zeitdiagramm verglichen werden.
- Die Dokumentation muss sich mit dem Code weiterentwickeln, um nützlich zu bleiben.
Durch die Einhaltung dieser Prinzipien können Firmware-Ingenieure Logik entwickeln, die der Zeit standhält und Stabilität in einer zunehmend komplexen digitalen Landschaft gewährleistet.