Dans le monde complexe des systèmes embarqués et de la conception numérique, la stabilité logique n’est pas simplement un souhait ; c’est une exigence. Le firmware agit comme l’intelligence derrière le silicium, déterminant la manière dont le matériel réagit aux stimuli externes. Toutefois, la complexité des microcontrôleurs modernes et des circuits intégrés spécifiques à une application (ASIC) entraîne souvent des bogues subtils difficiles à repérer. La méthode la plus robuste pour atténuer ces problèmes réside dans l’application rigoureuse de deux outils fondamentaux : les diagrammes de timing et les machines à états finis (FSM). Ensemble, ils forment un cadre rigoureux pour concevoir un firmware prévisible, vérifiable et maintenable.
Comprendre la relation entre le timing des signaux et l’état logique est crucial pour tout ingénieur travaillant sur la logique séquentielle. Lorsque ces deux concepts sont alignés, le firmware résultant se comporte de manière cohérente face aux variations de température, aux fluctuations de tension et aux changements de vitesse d’horloge. Ce guide explore comment tirer parti de ces outils pour créer une logique de firmware fiable, sans s’appuyer sur des suppositions ou un débogage par essais et erreurs.
📈 La base : comprendre les diagrammes de timing
Un diagramme de timing est une représentation graphique de la manière dont les signaux évoluent dans le temps. C’est le langage principal utilisé pour communiquer les relations temporelles entre les composants matériels et les routines de firmware. Dans le contexte de la logique du firmware, ces diagrammes agissent comme un contrat entre l’environnement matériel et le code qui s’exécute dessus.
Éléments clés d’un diagramme de timing
- Axe du temps :Représente l’évolution des cycles d’horloge ou du temps absolu. Il établit le rythme auquel le système fonctionne.
- Lignes de signal :Lignes horizontales représentant des entrées spécifiques, des sorties ou des drapeaux internes. Chaque ligne correspond à un bit ou à un groupe de bits.
- Bords :Transitions verticales indiquant des fronts montants (bas à haut) ou des fronts descendants (haut à bas). Ils déclenchent souvent des changements d’état.
- États haut/bas :Les niveaux logiques maintenus entre les transitions, définissant la valeur des données à tout instant donné.
- Délais :Intervales entre les événements, tels que le temps de préparation (setup), le temps de maintien (hold) ou le délai de propagation, qui définissent le temps minimal nécessaire pour assurer la stabilité.
Lors de la conception d’un firmware, un diagramme de timing répond à la question : « Quand les données sont-elles valides ? » et « Quand le système doit-il réagir ? » Sans ce contexte visuel, la conception logique devient un jeu de devinettes. Par exemple, si un signal de capteur est échantillonné trop tôt, avant qu’il ne se soit stabilisé, le firmware lira des données erronées. S’il est échantillonné trop tard, il pourrait manquer entièrement une impulsion.
Pourquoi les diagrammes de timing sont-ils importants dans le firmware
- Clarification des contraintes matérielles :Ils montrent explicitement les temps de préparation et de maintien requis par les périphériques.
- Référence pour le débogage :Lorsqu’un système échoue, un diagramme de timing fournit une référence pour comparer le comportement attendu au comportement réel.
- Communication :Ils servent de document universel pour que les équipes matérielles et logicielles s’entendent sur les protocoles d’interface.
- Optimisation :Ils aident à identifier les goulets d’étranglement où le logiciel attend inutilement des signaux matériels.
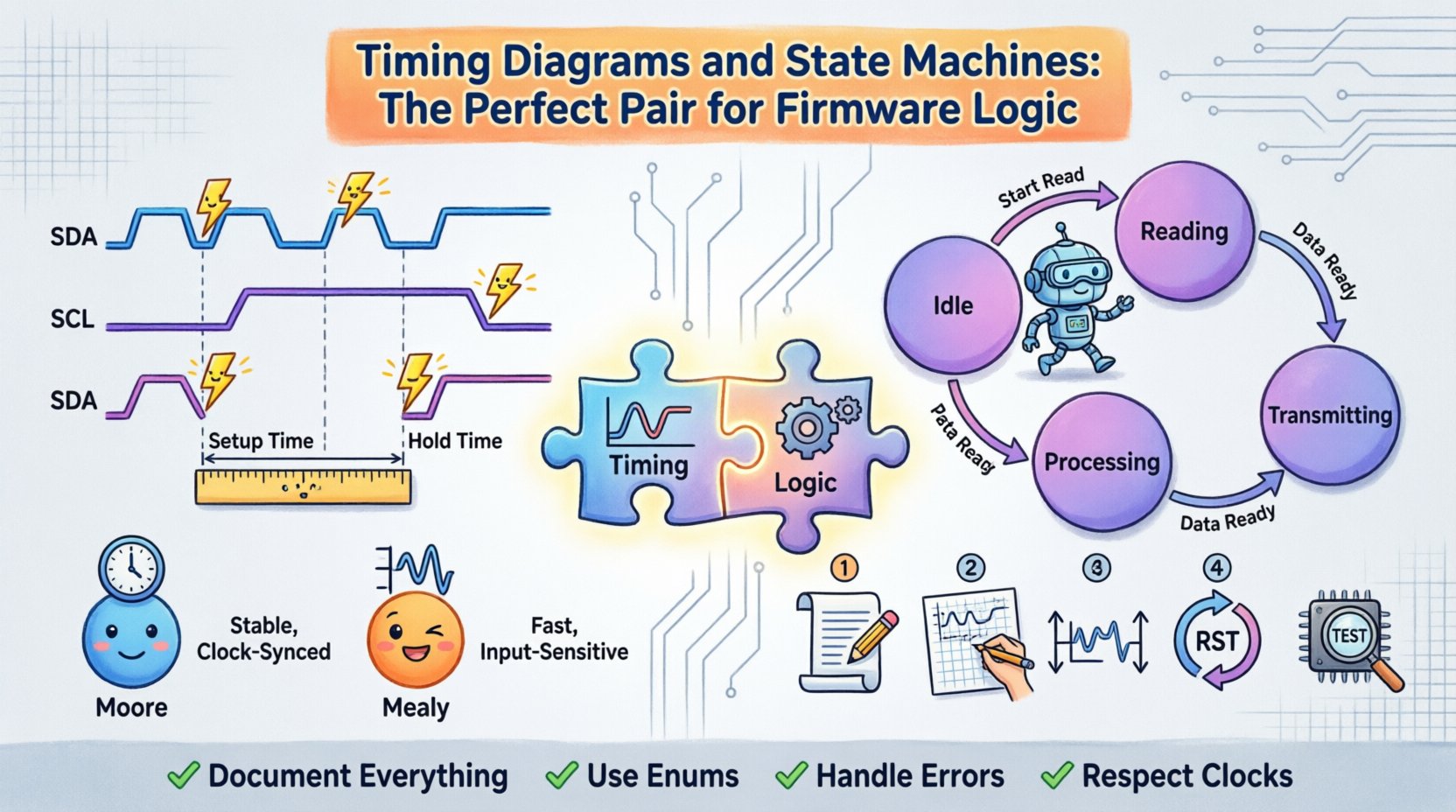
Prenons un scénario impliquant une interface de communication I2C. Le firmware doit attendre que la ligne d’horloge soit stabilisée avant de lire les données. Un diagramme de timing représente visuellement les lignes SDA et SCL, montrant précisément où se situent la condition de départ, l’octet d’adresse et l’octet de données. Cette visualisation évite les conditions de course où le logiciel tenterait de lire le bus de données alors que le maître est encore en train de piloter l’horloge.
🔄 Le moteur logique : machines à états finis (FSM)
Alors que les diagrammes de timing définissent l’environnement, la machine à états finis définit le comportement. Une FSM est un modèle de calcul utilisé pour concevoir à la fois des programmes informatiques et des circuits logiques séquentiels. Elle se compose d’un nombre fini d’états, de transitions entre ces états et d’actions.
Composants d’une machine à états
- État : Un instantané du système à un moment précis. Il représente le mode de fonctionnement actuel (par exemple, Inactif, Lecture, Traitement, Transmission).
- Transition : Le passage d’un état à un autre en fonction de conditions ou d’entrées spécifiques.
- Entrée : Signaux externes ou drapeaux internes qui déclenchent un changement d’état.
- Sortie : Actions ou signaux générés pendant un état spécifique (Moore) ou pendant une transition (Mealy).
Machine de Moore vs. Machine de Mealy
Le choix du bon type de machine à états est une décision de conception cruciale. Ce choix influence la sensibilité au temps et la stabilité des sorties.
| Fonctionnalité | Machine de Moore | Machine de Mealy |
|---|---|---|
| Dépendance de la sortie | Dépend uniquement de l’état actuel | Dépend de l’état actuel et de l’entrée |
| Stabilité temporelle | Plus stable ; les sorties ne changent que sur front d’horloge | Réponse plus rapide ; les sorties peuvent changer immédiatement avec l’entrée |
| Complexité | Peut nécessiter plus d’états pour gérer des combinaisons d’entrée spécifiques | Nécessite souvent moins d’états pour la même fonctionnalité |
| Sensibilité aux interférences | Moins sensible aux interférences d’entrée | Plus sensible aux interférences d’entrée |
Pour la logique de microprogramme où l’intégrité du signal est primordiale, les machines de Moore sont souvent préférées. Étant donné que les sorties sont strictement liées à l’état et généralement synchronisées sur le front d’horloge, elles réduisent le risque que des interférences asynchrones se propagent dans le système. Les machines de Mealy offrent une rapidité accrue, mais nécessitent une analyse minutieuse du temps pour s’assurer que les entrées ne provoquent pas de métastabilité.
🤝 Synchronisation du temps et de la logique
La véritable puissance de ce couple réside dans la synchronisation du diagramme temporel avec la logique de transition de la machine à états. Chaque transition dans la machine à états doit correspondre à un point valide dans le diagramme temporel. Si le signal matériel change à un moment en conflit avec le cycle d’horloge, le microprogramme peut entrer dans un état indéfini.
Établissement du domaine d’horloge
Toutes les transitions d’état devraient idéalement avoir lieu sur un front d’horloge spécifique (généralement le front montant). Le diagramme temporel doit montrer que toutes les signaux d’entrée sont stables pendant la période de préparation avant le front d’horloge et restent stables pendant la période de maintien après le front d’horloge. Une logique de microprogramme qui ignore ces fenêtres court le risque de capturer des données incorrectes.
Pour garantir cette alignement :
- Mapper les entrées aux cycles d’horloge : Définir exactement quel cycle d’horloge une entrée sera échantillonnée. Ne pas échantillonner une entrée de manière arbitraire au sein d’un cycle.
- Déboucler les entrées : Les interrupteurs mécaniques ou les capteurs bruyants nécessitent un temps de stabilisation. Le diagramme de timing doit inclure des fenêtres de débouclage, et la machine d’états doit disposer d’un état dédié « En attente » pour gérer cette période.
- Éviter de combiner des événements asynchrones : Si une interruption se produit, elle doit être synchronisée avec l’horloge du système avant d’entrer dans la logique de la machine d’états.
Gestion des entrées asynchrones
Tous les signaux ne sont pas synchronisés avec l’horloge du système. Les interruptions externes, les déclencheurs de capteurs ou les entrées utilisateur peuvent arriver à des moments aléatoires. Lorsque ces signaux interagissent avec une machine d’états synchronisée, le diagramme de timing devient le filet de sécurité.
La technique standard implique un synchroniseur à plusieurs étages. Le diagramme de timing doit illustrer le signal passant par deux ou plusieurs bascules, ce qui permet au signal de se stabiliser avant d’être lu par la machine d’états. Cela évite la métastabilité, un état où le signal n’est ni logiquement 0 ni 1, pouvant entraîner un blocage ou un plantage du système.
🛠️ Flux de mise en œuvre
Le développement de firmware en utilisant cette approche combinée nécessite un flux de travail structuré. Omettre des étapes conduit souvent à un code fragile, difficile à maintenir. Les étapes suivantes décrivent une méthodologie professionnelle pour intégrer les diagrammes de timing et les machines d’états.
1. Définir le protocole et les contraintes
Avant d’écrire une seule ligne de code, documentez les exigences de temporisation. Créez un diagramme de timing qui représente le comportement idéal. Incluez les largeurs minimales d’impulsion, les temps de réponse maximum et les états d’attente. Ce document constitue la source de vérité pour la logique du firmware.
2. Concevoir la topologie de la machine d’états
Esquissez le diagramme d’états. Identifiez tous les états possibles et les conditions nécessaires pour passer d’un état à un autre. Assurez-vous que chaque état dispose d’une condition de sortie définie. Évitez les états « orphelins » où le système pourrait rester bloqué indéfiniment.
3. Mapper la logique au timing
Alignez les transitions d’état avec les fronts d’horloge définis dans le diagramme de timing. Par exemple, si une machine d’états doit attendre un délai de 10 millisecondes, calculez combien de cycles d’horloge cela représente à la fréquence actuelle du système. Implémentez cela comme un compteur à l’intérieur de l’état, plutôt qu’une boucle logicielle d’attente bloquante pour le processeur.
4. Mettre en œuvre la logique de réinitialisation
Un firmware robuste doit revenir à un état connu lors d’une réinitialisation. Le diagramme de timing doit indiquer la durée du signal de réinitialisation. Le code d’initialisation de la machine d’états doit garantir que le système démarre dans l’état « Inactif » ou « Prêt » défini, indépendamment de la séquence de mise sous tension.
5. Vérification et simulation
Simulez la logique par rapport au diagramme de timing. Vérifiez les violations où le logiciel suppose qu’un signal est valide alors qu’il ne l’est pas. Recherchez les conditions de course où l’état change plus vite que le matériel ne peut répondre. Utilisez des environnements de simulation génériques pour modéliser le comportement du matériel et vérifier la logique du firmware par rapport aux contraintes de temporisation.
🔍 Débogage et vérification
Même avec une planification soigneuse, des problèmes surviennent. Lorsque la logique du firmware échoue, la combinaison des diagrammes de timing et des machines d’états fournit une stratégie de débogage puissante. Au lieu de journaux aléatoires, utilisez ces outils pour isoler le point de défaillance.
Violations de temporisation courantes
- Violation du temps de préparation : L’entrée de données a changé trop près du front d’horloge. Le firmware lit des données instables. Solution : Déplacer le point d’échantillonnage dans la machine d’états vers un cycle ultérieur.
- Violation du temps de maintien : L’entrée de données a changé trop tôt après le front d’horloge. La bascule perd l’état précédent. Solution : Ajouter un tampon ou un délai dans le chemin matériel.
- Métastabilité : Le signal est non résolu. Le système peut se comporter de manière erratique. Solution : Mettre en œuvre un synchroniseur à deux étapes approprié.
Erreurs de machine à états
- États inaccessibles : États qu’il est impossible d’entrer ou de quitter. Cela indique généralement des erreurs logiques dans les conditions de transition.
- Transitions parasites : Le système entre dans un état qu’il ne devrait pas en raison du bruit. Solution : Ajouter une validation d’entrée ou des états d’atténuation du bruit.
- Boucles infinies : Le système reste bloqué dans un état pour toujours. Solution : Assurez-vous que tous les états disposent d’un délai d’expiration ou d’une condition de sortie.
Utilisation du diagramme pour l’analyse des causes racines
Lorsqu’un bug survient, superposez les traces réelles des signaux au diagramme temporel idéal. Recherchez les écarts. Le signal d’entrée est-il arrivé en retard ? Le signal d’horloge présente-t-il des fluctuations ? La machine à états a-t-elle effectué une transition prématurée ? Cette comparaison visuelle réduit considérablement l’espace de recherche par rapport à la lecture des logs bruts du code.
📊 Meilleures pratiques pour une logique robuste
Pour maintenir une qualité et une fiabilité élevées tout au long du cycle de vie d’un projet, respectez ces meilleures pratiques. Ces directives aident à prévenir la dette technique et assurent que le firmware reste adaptable.
- Documentez tout : Maintenez les diagrammes temporels et les diagrammes d’états à jour en parallèle avec le code. Une documentation obsolète est pire qu’aucune documentation.
- Gardez les états simples : Évitez les machines à états complexes avec trop de branches. Si une machine possède plus de 10 états, envisagez de la diviser en sous-machines.
- Utilisez des énumérations explicites : Définissez les noms d’états comme constantes ou énumérations. Évitez d’utiliser des nombres magiques comme « if (state == 3) ». Utilisez « if (state == STATE_IDLE) ».
- Gérez les erreurs de manière élégante : Incluez un état « Erreur ». Si le système détecte une condition invalide, effectuez une transition vers cet état et mettez en pause ou réinitialisez, plutôt que de continuer avec une logique non définie.
- Respectez les domaines d’horloge : Si le système utilise plusieurs fréquences d’horloge, mettez en œuvre des techniques appropriées de passage entre domaines d’horloge. Ne déplacez jamais directement des données entre des horloges asynchrones.
- Minimisez les délais bloquants : N’utilisez pas de boucles « while » qui attendent qu’une durée s’écoule. Utilisez la machine à états pour gérer le temps à l’aide de compteurs, permettant au processeur de gérer d’autres tâches.
🔗 Exemple d’application dans le monde réel
Pensez à un système de gestion de batterie simple. Le microprogramme surveille la tension, contrôle le courant de charge et communique l’état à un ordinateur hôte.
État 1 : Inactif. Le système attend un signal de demande de charge. Le diagramme temporel indique que ce signal doit rester à l’état haut pendant au moins 5 millisecondes.
État 2 : Chargement. Lorsqu’une demande valide est reçue, le système entre en mode de chargement. Un état temporisateur garantit que le courant circule pendant une durée spécifique. Si la tension dépasse la limite, le système passe à “État 3 : Protection contre la surtension.
État 3 : Protection. Le circuit de charge est désactivé. Le système attend que la tension descende en dessous d’un seuil de sécurité avant de revenir à l’arrêt. Un diagramme temporel garantit que le capteur de tension n’est échantillonné qu’après que l’unité de protection a physiquement déconnecté la charge.
Sans machine à états, le code pourrait vérifier la tension dans une boucle continue. Si la tension augmente brièvement, la boucle pourrait réagir trop vite, provoquant des oscillations. Avec la machine à états, la transition vers la protection nécessite une condition stable au fil du temps, évitant ainsi les déclenchements erronés.
🚀 En avant
L’intégration des diagrammes temporels et des machines à états n’est pas seulement un choix de conception ; c’est une discipline qui distingue le code fonctionnel du firmware prêt à être mis en production. En définissant visuellement les contraintes temporelles et en structurant le flux logique, les ingénieurs conçoivent des systèmes résilients face au bruit, aux variations matérielles et aux contraintes opérationnelles.
Cette approche exige un effort préalable. Elle demande du temps pour dessiner des diagrammes et planifier les états avant le début du codage. Toutefois, le coût de débogage d’une condition de course sur le terrain dépasse largement celui de la conception correcte dès le départ. À mesure que les systèmes deviennent plus complexes, la nécessité de cette méthodologie structurée augmente. Il n’y a pas de raccourci vers la fiabilité. Le chemin à suivre implique une documentation continue, une vérification rigoureuse et un respect des contraintes temporelles du monde physique.
Adopter ces pratiques garantit que la logique du firmware reste transparente et testable. Cela permet aux équipes de collaborer efficacement, en sachant que les diagrammes temporels définissent la réalité dans laquelle les machines à états opèrent. Dans un secteur où le matériel est coûteux et où le délai de mise sur le marché est critique, ce couple offre la meilleure chance de succès.
✅ Points clés
- Les diagrammes temporels fournissent le contrat visuel du comportement des signaux au fil du temps.
- Les machines à états fournissent la logique structurée du comportement du système.
- La synchronisation est le lien critique entre les deux outils.
- Les machines de Moore offrent une meilleure stabilité temporelle que les machines de Mealy pour la plupart des tâches embarquées.
- Le débogage est le plus efficace lorsque les traces réelles sont comparées au diagramme temporel idéal.
- La documentation doit évoluer avec le code pour rester utile.
En s’attachant à ces principes, les ingénieurs de firmware peuvent concevoir une logique qui résiste au temps, assurant une stabilité dans un paysage numérique de plus en plus complexe.