Concevoir des systèmes où le timing est primordial exige une approche rigoureuse. Que ce soit pour développer des unités de contrôle automobiles critiques pour la sécurité, des avioniques aérospatiales ou des contrôleurs d’automatisation industrielle, la prévisibilité de l’exécution est incontournable. Le comportement déclenché par le temps est un modèle architectural fondamental utilisé pour garantir que les actions du système se produisent à des intervalles précis, indépendamment des interruptions externes. Ce guide vous plonge en profondeur dans la méthodologie de modélisation de ce comportement à l’aide de diagrammes temporels.
Nous explorerons les fondements théoriques, les étapes pratiques de construction et la vérification rigoureuse nécessaire pour garantir la fiabilité. À la fin de ce parcours, vous comprendrez comment traduire des exigences temporelles abstraites en spécifications concrètes et visuelles qui pilotent une conception de système robuste. 🛠️
🔍 Comprendre les architectures déclenchées par le temps
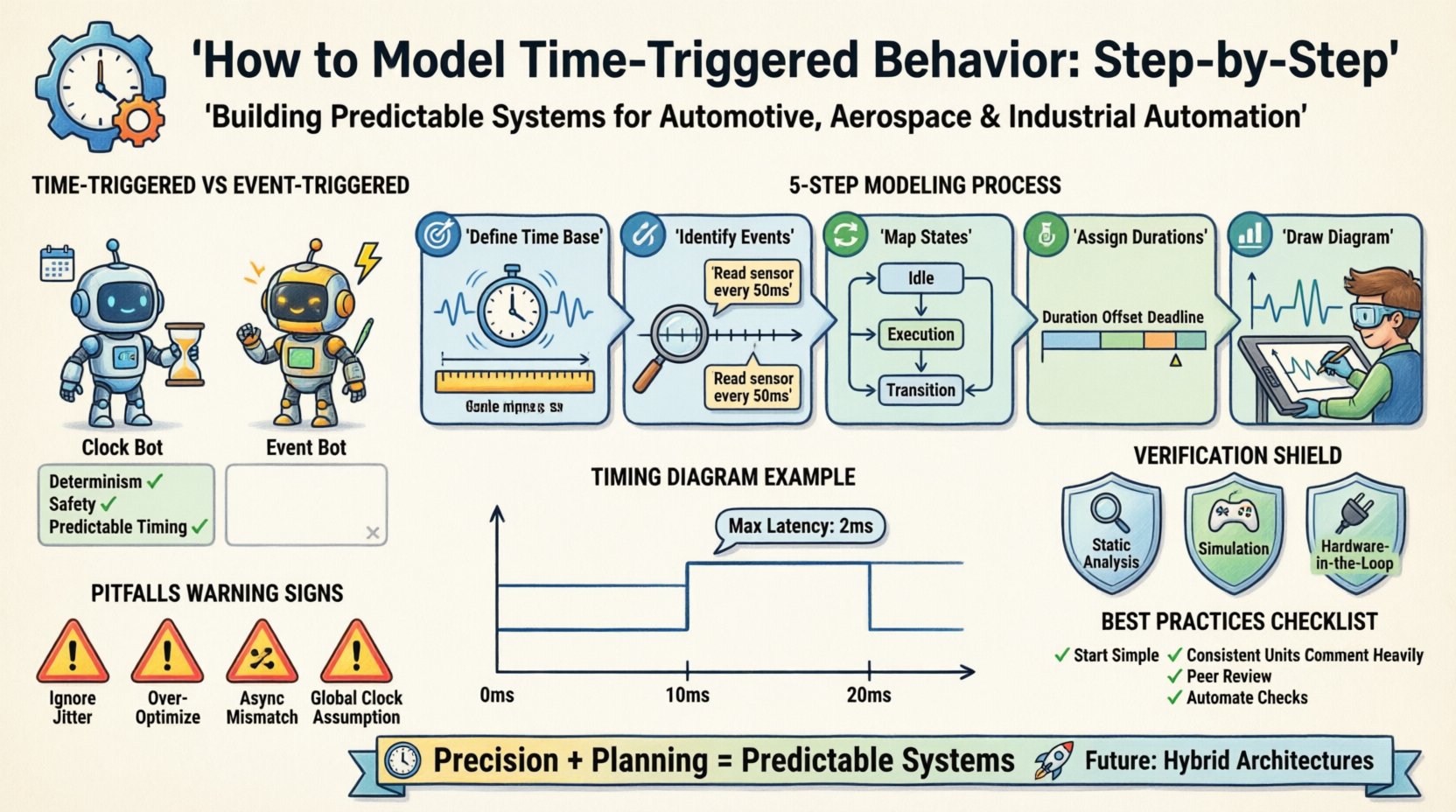
Avant de plonger dans le processus de modélisation, il est essentiel de comprendre la distinction entre les systèmes déclenchés par le temps et les systèmes déclenchés par événement. Dans un système déclenché par événement, un composant agit uniquement lorsqu’un stimulus spécifique se produit. Cela est efficace, mais peut entraîner des latences imprévisibles sous charge élevée. À l’inverse, les systèmes déclenchés par le temps fonctionnent selon une horloge globale ou locale. Les actions sont planifiées pour se produire à des moments prédéterminés.
- Déterminisme : L’avantage principal. Vous savez exactement quand une tâche s’exécutera.
- Sécurité : Plus facile de prouver que les délais sont respectés dans les contextes critiques pour la sécurité.
- Complexité : Exige une synchronisation soigneuse entre les nœuds distribués.
Lors de la modélisation de ce comportement, nous nous appuyons sur les diagrammes temporels. Ces outils visuels représentent la relation entre les signaux, les états et le temps. Ils servent de plan directeur pour les développeurs logiciels comme pour les ingénieurs matériels. 📊
📋 Prérequis pour une modélisation efficace
Passer directement au dessin d’un diagramme sans fondation claire conduit souvent à des erreurs. Une préparation adéquate garantit que le modèle reflète les contraintes physiques et logiques réelles du système. Vous devez rassembler des entrées spécifiques avant de commencer le processus de modélisation.
1. Spécification des exigences
Chaque contrainte temporelle provient d’une exigence. Y a-t-il une latence maximale autorisée pour une lecture de capteur ? Y a-t-il une fréquence minimale pour une boucle de contrôle ? Ces valeurs doivent être clairement documentées. L’ambiguïté ici est l’ennemi de la précision.
2. Contraintes matérielles
L’environnement physique dicte les limites de votre modèle. Quelle est la fréquence d’horloge du microcontrôleur ? Quel est le niveau de jitter sur le bus de communication ? Ces réalités matérielles doivent être prises en compte dans les marges de temps. 🖥️
3. Dépendances entre composants
Les systèmes existent rarement en isolation. Un contrôleur de moteur dépend du système de freinage, qui à son tour dépend de la matrice de capteurs. Comprendre le flux de données et les dépendances est crucial pour établir la séquence correcte des événements.
⚙️ Processus de modélisation étape par étape
La construction d’un modèle déclenché par le temps est un exercice méthodique. Il consiste à décomposer le comportement du système en unités temporelles fines et à attribuer de la logique à ces unités. Suivez cette approche structurée pour garantir une précision maximale.
Étape 1 : Définir la base temporelle
La fondation de tout diagramme temporel est l’axe du temps. Vous devez établir une horloge de référence. On l’appelle souvent le « tick système » ou le « temps de cycle ».
- Choisissez une granularité : Modéliserez-vous en millisecondes, en microsecondes ou en cycles d’horloge ? Choisissez l’unité la plus petite nécessaire pour capturer le comportement critique.
- Définissez la période : Déterminez la période fondamentale du système. Par exemple, si une boucle de contrôle s’exécute tous les 10 millisecondes, votre période de base doit être de 10 ms ou un de ses diviseurs.
- Marquez les ticks : Marquez visuellement ou logiquement le début de chaque cycle. Ce sont les moments où les actions déclenchées par le temps sont autorisées à s’activer.
Étape 2 : Identifier les événements déclenchés par le temps
Toute action dans un système n’est pas déclenchée par le temps. Vous devez distinguer entre les événements qui surviennent en raison du temps et ceux qui surviennent en raison de changements d’état. Isoler les actions qui doivent se produire à des intervalles spécifiques.
| Type d’événement | Condition de déclenchement | Exemple |
|---|---|---|
| Déclenché par le temps | Heure/Cycle spécifique | Lire le capteur toutes les 50 ms |
| Déclenché par un événement | Changement de signal | Alerte lorsque la température > 100°C |
| Hybride | Temps + Événement | Envoyer les données si le temps est de 100 ms ET le tampon est plein |
Concentrez vos efforts de modélisation principalement sur la colonne Déclenché par le temps. Ce sont les repères prévisibles de votre conception.
Étape 3 : Cartographier les transitions d’état
Une fois la base temporelle définie et les événements identifiés, vous devez définir les états que le système occupe pendant ces intervalles. Une machine à états est souvent la logique sous-jacente.
- État d’attente : Que fait le système en attendant le prochain déclenchement ? Consomme-t-il de l’énergie ? Interroge-t-il les entrées ?
- État d’exécution : Les actions spécifiques effectuées lorsque le minuteur se déclenche. Cela inclut les calculs, la communication ou l’actionnement.
- Logique de transition : Définissez les conditions nécessaires pour passer d’un état à un autre. Bien que le temps déclenche l’entrée, la logique d’état détermine la sortie.
Assurez-vous que les transitions d’état sont mutuellement exclusives lorsque cela est possible, afin d’éviter les conditions de course. ⚡
Étape 4 : Affecter les durées et les décalages
Savoir quand une tâche commence n’est que la moitié de la bataille. Vous devez également définir pendant combien de temps elle dure et tout décalage par rapport au début du cycle.
- Durée : Estimez le temps d’exécution. Incluez le temps d’exécution au pire cas (WCET) pour garantir des marges de sécurité.
- Délai : La tâche commence-t-elle immédiatement au début du cycle (délai 0), ou y a-t-il un retard ? Par exemple, une lecture de capteur pourrait commencer à 5 ms dans un cycle de 10 ms afin de permettre à la tâche précédente de se terminer.
- Délais : Quand doit la sortie être prête ? Cela définit la fin de la fenêtre de tâche.
Étape 5 : Dessinez le diagramme de timing
C’est la phase de visualisation. Utilisez une notation standard pour représenter les données que vous avez collectées. Un diagramme de timing a généralement le temps sur l’axe horizontal et les signaux ou états sur l’axe vertical.
- Tracez l’axe du temps : Marquez clairement les intervalles (par exemple, 0 ms, 10 ms, 20 ms).
- Représentez les signaux : Dessinez des lignes horizontales pour les états haut/bas ou des pics verticaux pour les impulsions.
- Ajoutez des annotations : Utilisez des flèches ou du texte pour indiquer des contraintes spécifiques, telles que « Latence maximale : 2 ms ».
- Mettez en évidence les cycles : Regroupez visuellement les segments qui représentent une période complète de la base temporelle.
📐 Normes de notation des diagrammes de timing
Pour garantir que votre modèle soit compris par d’autres ingénieurs, respectez les conventions établies de notation. Bien que les styles spécifiques puissent varier, les principes fondamentaux restent constants.
- Lignes de signal : Les lignes horizontales représentent l’état d’un signal au fil du temps. Les lignes verticales représentent des transitions instantanées.
- États haut/bas : Définissez clairement ce que représentent physiquement les niveaux logiques 1 et 0 (par exemple, 3,3 V contre 0 V).
- Retards : Utilisez des crochets ou des symboles spécifiques pour indiquer le retard entre l’entrée et la sortie.
- Parallélisme : Utilisez des signaux empilés pour montrer des activités concurrentes. Si deux tâches s’exécutent simultanément, leurs blocs de temps doivent être alignés horizontalement.
La clarté est primordiale. Si un collègue ne peut pas lire votre diagramme en moins de cinq minutes, il nécessite des améliorations. 👁️
🛡️ Vérification et validation
La modélisation n’est pas terminée tant que le design n’a pas été vérifié. Cette étape garantit que le modèle théorique correspond aux exigences prévues et peut résister aux conditions du monde réel.
1. Analyse statique
Examinez le modèle pour vérifier sa cohérence logique. Y a-t-il des fenêtres de temps où deux tâches entrent en conflit ? La bande passante du bus est-elle suffisante pour les transferts de données planifiés ? Les outils d’analyse statique peuvent souvent détecter ces conflits automatiquement.
2. Simulation
Exécutez une simulation virtuelle du modèle. Alimentez-le avec des cas de test qui simulent un fonctionnement normal et des cas limites (par exemple, perte de signal, délai réseau). Observez si les contraintes de temps sont violées.
- Tests de charge :Poussez le système à ses limites. Que se passe-t-il si le jitter de l’horloge augmente ?
- Tests aux limites :Testez exactement aux limites de vos fenêtres de temps définies.
3. Simulation matérielle en boucle (HIL)
Lorsque cela est possible, connectez le modèle à du matériel réel. Cela permet de capturer les bruits électriques du monde réel et les délais de traitement que pourrait manquer un modèle logiciel pur. 🖧
⚠️ Pièges courants dans la modélisation déclenchée par le temps
Même les ingénieurs expérimentés rencontrent des défis spécifiques lorsqu’ils travaillent sur des systèmes déclenchés par le temps. Être conscient de ces problèmes courants peut économiser un temps considérable en débogage.
1. Ignorer le jitter
Les horloges réelles ne sont pas parfaites. Elles dérivent et présentent un jitter. Si vous modélisez un cycle parfait de 10 ms, votre système échouera lorsque l’horloge varie de 1 %. Incluez toujours une marge de jitter dans vos marges de temps.
2. Sur-optimisation
Essayer de faire rentrer chaque tâche dans la fenêtre la plus étroite possible peut rendre le système fragile. Laissez une marge de temps pour les événements imprévus ou les interruptions prioritaires. Un système robuste est préférable à un système parfaitement optimisé. ⚖️
3. Mauvaises correspondances asynchrones
Les systèmes déclenchés par le temps interagissent souvent avec des périphériques déclenchés par événement. Par exemple, une entrée clavier est déclenchée par événement, mais le système la sonde selon un déclenchement temporel. Si le taux de sondage est trop lent, les entrées sont manquées. S’il est trop rapide, des ressources sont gaspillées.
4. Hypothèses sur l’horloge globale
Dans les systèmes distribués, supposer que tous les nœuds partagent une horloge parfaitement synchronisée est dangereux. La latence du réseau et le décalage des horloges doivent être pris en compte à l’aide de protocoles de synchronisation.
🔄 Maintenance et évolution
Un diagramme temporel n’est pas un artefact ponctuel. À mesure que les exigences évoluent, le modèle doit évoluer. Cette section décrit comment maintenir l’intégrité de votre modèle déclenché par le temps tout au long du cycle de vie du projet.
Contrôle de version
Traitez vos diagrammes temporels comme du code. Utilisez des systèmes de contrôle de version pour suivre les modifications. Cela vous permet de revenir à des versions antérieures si une nouvelle modification introduit des violations de temps.
Analyse des impacts des modifications
Avant de modifier une contrainte de temps, effectuez une analyse d’impact. Changer la durée d’un cycle de 10 ms à 5 ms double la charge du CPU et divise par deux le temps disponible pour les autres tâches. Documentez les effets en chaîne de toute modification.
Mises à jour de la documentation
Maintenez les exigences textuelles alignées avec le modèle visuel. Si le diagramme change, le document des exigences doit être mis à jour immédiatement. Les écarts entre texte et diagramme entraînent des erreurs d’implémentation. 📝
📊 Comparaison des approches de modélisation
Bien que la modélisation déclenchée par le temps soit au centre de cet exposé, il est utile de la comparer brièvement à d’autres styles de modélisation afin de comprendre son domaine spécifique.
| Approche | Focus principal | Meilleur usage pour |
|---|---|---|
| Déclenchement par horloge | Latence prévisible | Boucles de contrôle critiques pour la sécurité |
| Déclenchement par événement | Réactivité | Interfaces utilisateur, tâches en arrière-plan |
| Flux de données | Débit | Pipelines de traitement de signal |
Comprendre où le modèle déclenché par horloge s’inscrit dans cet écosystème aide à choisir les bons outils et techniques pour la tâche.
🎯 Meilleures pratiques pour réussir
Pour garantir que vos modèles de comportement déclenchés par horloge sont robustes et maintenables, suivez ces meilleures pratiques établies.
- Commencez simplement :Modélisez d’abord la boucle principale. Ajoutez de la complexité et des tâches périphériques uniquement après avoir vérifié le timing principal.
- Utilisez des unités cohérentes :Restez sur les millisecondes ou les microsecondes tout au long du projet. Mélanger les unités entraîne des erreurs de calcul.
- Commentez abondamment :Annotez chaque décision importante concernant le timing. Expliquez pourquoiun décalage de 5 ms a été choisi, et non pas simplement queil a été choisi.
- Revoyez régulièrement :Effectuez des revues par les pairs des diagrammes de timing. Un deuxième regard repère souvent un délai manqué ou une condition de course.
- Automatisez les vérifications :Lorsque c’est possible, utilisez des scripts pour valider les contraintes de timing par rapport au modèle. Cela réduit les erreurs humaines.
🔮 L’avenir des modèles de timing
À mesure que les systèmes embarqués deviennent plus complexes, la demande de modèles de timing précis augmente. Les systèmes modernes combinent souvent les paradigmes déclenchés par horloge et déclenchés par événement dans une architecture hybride. Cela exige des techniques de modélisation encore plus sophistiquées.
Les progrès futurs pourraient inclure la génération automatisée de diagrammes de timing à partir de code de haut niveau, réduisant ainsi les efforts manuels nécessaires. Toutefois, le besoin fondamental d’une surveillance humaine et de validation logique reste constant. Les ingénieurs qui comprennent les principes sous-jacents du comportement déclenché par le temps resteront essentiels. 🚀
📝 Résumé des points clés à retenir
Modéliser le comportement déclenché par le temps est une compétence essentielle pour assurer la fiabilité du système. En établissant une base temporelle claire, en identifiant des déclencheurs spécifiques, en cartographiant les états et en vérifiant rigoureusement la conception, vous créez une base pour des performances de système prévisibles. Souvenez-vous que le timing ne concerne pas seulement la vitesse ; il s’agit d’ordre et de certitude.
Points clés à retenir :
- Établir une base temporelle précise et une période de cycle.
- Différencier les actions déclenchées par le temps et celles déclenchées par un événement.
- Utiliser la notation standard des diagrammes de timing pour plus de clarté.
- Tenir compte des variations matérielles (jitter) et de la variabilité d’exécution.
- Maintenir le modèle tout au long du cycle de vie du système.
Avec discipline et une attention aux détails, vous pouvez construire des systèmes qui fonctionnent avec la précision exigée par la technologie moderne. Le chemin vers la fiabilité est pavé de modèles de timing précis. ⏱️