En el mundo complejo de los sistemas embebidos y la arquitectura de Internet de las Cosas (IoT), el tiempo no es simplemente una métrica; es una restricción fundamental que determina la estabilidad del sistema. Cuando múltiples hilos o interrupciones intentan acceder a recursos compartidos simultáneamente, surge la posibilidad de una condición de carrera. Esta guía ofrece un análisis técnico sobre cómo diagnosticar estos problemas de sincronización utilizando diagramas de tiempos. Exploraremos la mecánica de la ejecución concurrente, analizaremos las transiciones de señal e identificaremos el momento preciso en que la lógica se desvía del comportamiento esperado.
🧩 Comprender la concurrencia en sistemas embebidos
Los dispositivos IoT a menudo operan bajo estrictas restricciones de energía y procesamiento. Para maximizar la eficiencia, los desarrolladores implementan con frecuencia procesos concurrentes. Esto significa que la unidad central de procesamiento (CPU) maneja múltiples tareas, como la encuesta de sensores, la transmisión de red y el control de actuadores, aparentemente al mismo tiempo. Sin embargo, la verdadera paralelización es rara en los microcontroladores de núcleo único. En su lugar, el cambio rápido de contexto crea la ilusión de simultaneidad.
- Memoria compartida: Variables accesibles tanto por una rutina de servicio de interrupción (ISR) como por el bucle principal.
- Periféricos de hardware: Registros utilizados para la comunicación UART, SPI o I2C.
- Máquinas de estado: Lógica que cambia de estado según desencadenantes externos.
Cuando estos elementos interactúan sin primitivas de sincronización adecuadas, el estado del sistema se vuelve no determinista. Ocurre una condición de carrera cuando el resultado de un proceso depende del tiempo relativo de eventos que no están garantizados para ocurrir en un orden específico.
📊 El papel de los diagramas de tiempos en la depuración 🛠️
Un diagrama de tiempos es una representación visual de señales sobre un eje de tiempo definido. En el contexto de la depuración, sirve como una herramienta forense. A diferencia de una revisión estática de código, un diagrama de tiempos captura el comportamiento dinámico de la interacción entre hardware y software. Permite a los ingenieros ver la latencia, el jitter y las ventanas de ejecución superpuestas.
Componentes clave de un diagrama de tiempos
| Componente | Descripción | Relevancia para las condiciones de carrera |
|---|---|---|
| Eje de tiempo | Línea horizontal que representa la duración (ns, μs, ms) | Establece la secuencia de eventos |
| Líneas de señal | Líneas verticales que representan pines o variables específicas | Muestra estados alto/bajo o cambios de datos |
| Transiciones | Bordes donde cambia el estado de la señal (ascendente/bajante) | Indica puntos de activación para interrupciones |
| Marcadores de latencia | Retardos entre el desencadenamiento y la respuesta | Revela cuellos de botella de procesamiento |
🏭 Escenario del estudio de caso: Medidor de energía inteligente
Considere un medidor de energía IoT diseñado para medir pulsos de voltaje y corriente. El dispositivo debe registrar estos pulsos en memoria no volátil mientras transmite simultáneamente un paquete resumen a una pasarela en la nube mediante un módulo celular. La arquitectura del sistema incluye un bucle principal de aplicación y una interrupción de hardware desencadenada por el cruce de un umbral de voltaje.
Especificaciones del sistema
- Microcontrolador:Procesador basado en ARM Cortex-M4 de 32 bits
- Recurso compartido:Una variable contador de 4 bytes en RAM
- Fuente de interrupción:Comparador de voltaje externo
- Tarea del bucle principal:Agregación y transmisión periódica de datos
La lógica prevista es sencilla: cuando ocurre un pico de voltaje, la interrupción incrementa el contador. El bucle principal lee el contador, transmite el valor y lo reinicia a cero. Bajo carga normal, esto funciona. Sin embargo, bajo condiciones de alta carga, se produce corrupción de datos.
📈 Análisis del flujo de señal
Para diagnosticar el problema, construimos un diagrama de tiempos centrado en la interacción entre la rutina de servicio de interrupción (ISR) y el bucle principal. El diagrama visualiza el flujo de ejecución de la CPU, el estado de la señal del contador compartido y el estado de la línea de datos del periférico.
Fase 1: El ciclo de lectura-modificación-escritura
El núcleo de la condición de carrera reside en la secuencia de lectura-modificación-escritura (RMW). Esta operación no es atómica en muchas arquitecturas. Involucra tres pasos distintos:
- Lectura:La CPU recupera el valor actual desde la memoria.
- Modificación:La CPU suma uno al valor del registro.
- Escritura:La CPU almacena el nuevo valor de vuelta en la memoria.
Si ocurre una interrupción entre el paso 1 y el paso 3, se compromete la integridad de los datos. Examinemos la representación del diagrama de tiempos de este evento.
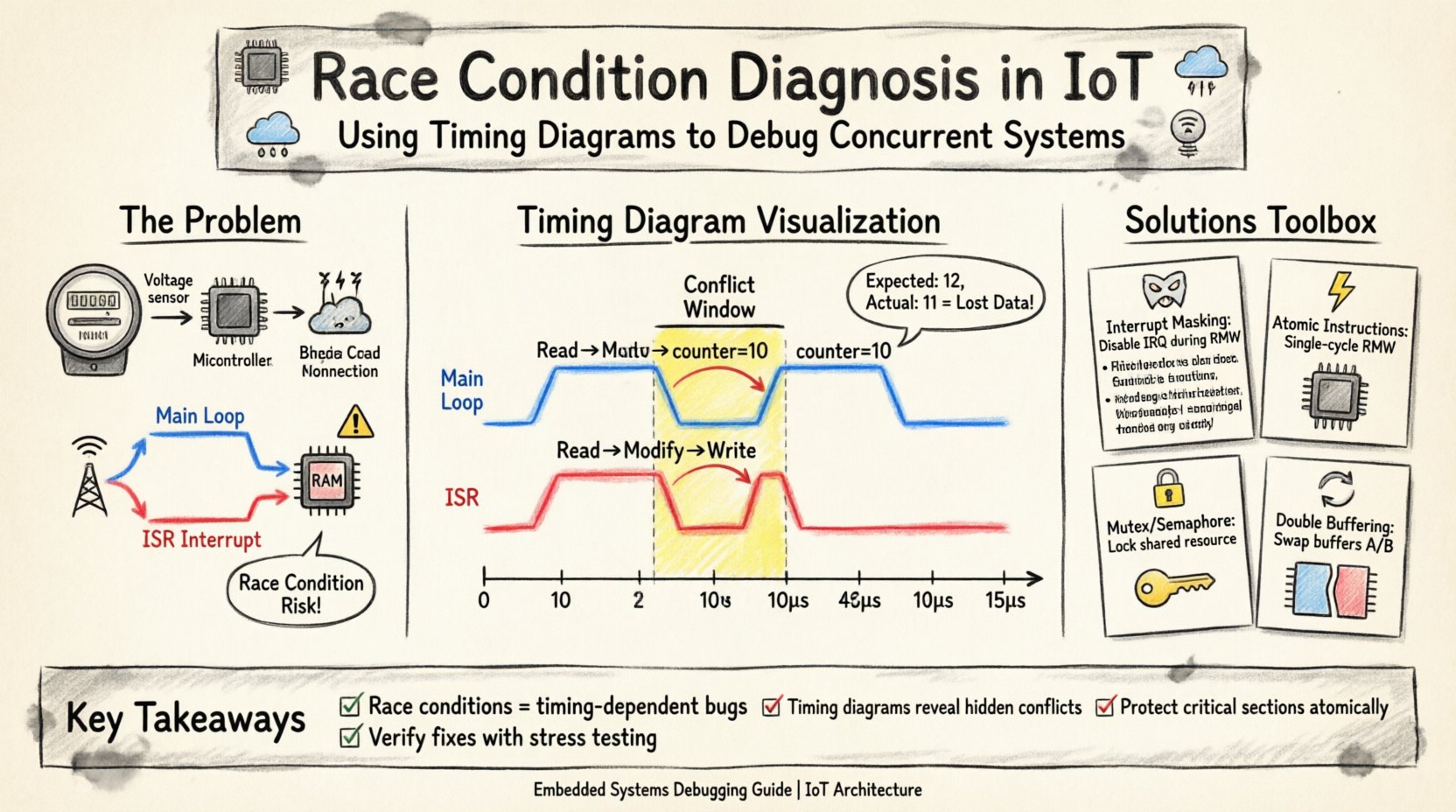
Visualización del diagrama de tiempos
| Tiempo (μs) | Bucle principal | ISR | Valor del contador compartido |
|---|---|---|---|
| 0 | Leer contador (Valor: 10) | Inactivo | 10 |
| 2 | El registro contiene 10 | Interrupción activada | 10 |
| 5 | Modificar (10 + 1 = 11) | Leer contador (Valor: 10) | 10 |
| 8 | Interrupción pendiente | Modificar (10 + 1 = 11) | 10 |
| 10 | Escribir (11) | Escribir (11) | 11 |
| 12 | Reiniciar contador (0) | Volver a la interrupción | 0 |
| 15 | Final del ciclo | Volver al bucle principal | 0 |
Observe la discrepancia en el valor final. Tanto el bucle principal como la ISR leen el valor 10. Ambos suman uno, lo que da como resultado 11. El bucle principal escribe 11. La ISR sobrescribe esto con 11. El resultado neto es un conteo de 11, cuando debería ser 12. El pulso detectado por la ISR se perdió efectivamente porque el bucle principal estaba en medio de procesar el conteo anterior.
🔍 Identificación de la ventana de conflicto
El diagrama de tiempos hace visible la ventana de conflicto. Este es el intervalo entre la lectura de la variable por el bucle principal y la escritura del nuevo valor. En esta arquitectura específica, el ciclo dura aproximadamente 8 microsegundos. La latencia de interrupción debe ser menor que esta ventana para que ocurra la condición de carrera.
Factores que influyen en la ventana
- Velocidad del reloj:Las frecuencias más altas reducen el tiempo físico del ciclo RMW.
- Latencia de memoria:Los estados de espera en SRAM o Flash pueden prolongar los tiempos de lectura/escritura.
- Optimizaciones del compilador:La inlining o la asignación de registros pueden alterar el tiempo de ejecución de las instrucciones.
- Prioridad de interrupción:Si la prioridad de interrupción es menor que la de una sección crítica en el bucle principal, la condición de carrera podría quedar enmascarada.
Al medir los ciclos de reloj reales utilizando un analizador lógico o un monitor de rendimiento integrado, los ingenieros pueden calcular la ventana exacta de exposición. Esta información es crucial para determinar si una solución de software simple es viable o si se requiere una intervención de hardware.
🛡️ Estrategias de resolución
Una vez confirmada la condición de carrera mediante el análisis de tiempos, se requieren cambios arquitectónicos específicos. El objetivo es garantizar que la sección crítica (la operación RMW) se ejecute de forma atómica o esté protegida de interrupciones.
1. Enmascaramiento de interrupciones
El enfoque más directo consiste en deshabilitar las interrupciones durante la sección crítica. Esto garantiza que ninguna ISR pueda prevenir al bucle principal mientras está actualizando la variable compartida.
- Implementación:Utilice instrucciones en ensamblador para borrar la bandera de habilitación de interrupciones antes de la lectura y establecerla después de la escritura.
- Ventajas:Garantiza la atomicidad sin necesidad de estructuras de datos complejas.
- Desventajas:Aumenta la latencia de interrupción para todos los demás periféricos. Las interrupciones de alta prioridad podrían retrasarse, afectando el rendimiento en tiempo real.
2. Instrucciones atómicas
Los procesadores modernos suelen ofrecer soporte de hardware para operaciones atómicas. Estas instrucciones realizan la secuencia Leer-Modificar-Escribir en un único ciclo de máquina indivisible.
- Implementación:Utilice funciones de biblioteca o intrínsecos que se mapeen a instrucciones atómicas de comparar y intercambiar (CAS) o obtener y sumar.
- Ventajas:Mínimo sobrecoste de rendimiento; no requiere deshabilitar las interrupciones globales.
- Desventajas:Dependencia del hardware; no está disponible en todos los microcontroladores heredados.
3. Bloqueo de software (Mutex/Semaforo)
Para recursos compartidos más complejos, como un buffer de comunicación, es necesario un mecanismo de bloqueo. Esto garantiza que solo un hilo o proceso acceda al recurso a la vez.
- Implementación: Una bandera en memoria que indica que el recurso está ocupado. La Bucle Principal verifica la bandera; la ISR verifica la bandera antes de intentar el acceso.
- Ventajas:Flexible; permite la priorización de tareas.
- Desventajas:Introduce sobrecarga de cambio de contexto y posibilidad de bloqueo si no se gestiona correctamente.
4. Doble bufferización
Para escenarios de transmisión de datos, la doble bufferización puede eliminar la necesidad de sincronización durante la fase de escritura. El Bucle Principal escribe en el Buffer A mientras la ISR lee desde el Buffer B.
- Implementación:Mantenga dos regiones de memoria distintas. Intercambie punteros entre ellas cuando un bloque completo esté listo.
- Ventajas:Evita la corrupción de datos durante la transmisión; desacopla la producción y el consumo.
- Desventajas:Duplica el uso de memoria; requiere una gestión cuidadosa de punteros.
🔄 Verificación y pruebas
Después de aplicar una corrección, se debe regenerar el diagrama de tiempos para verificar la solución. El objetivo es comprobar que la superposición entre las secciones críticas del Bucle Principal y la ISR se ha eliminado.
Protocolo de prueba
- Prueba de estrés:Maximice la frecuencia de interrupciones y la carga del bucle principal para inducir condiciones de peor caso.
- Análisis de registros:Compare el valor del contador con una referencia conocida (por ejemplo, generador de pulsos externo).
- Captura de señal:Registre el diagrama de tiempos durante la prueba de estrés para confirmar la ausencia de la ventana de conflicto.
Si el diagrama de tiempos muestra que la ISR se ejecuta completamente antes de que el Bucle Principal acceda a la variable, o que la variable está bloqueada durante la transición, la condición de carrera se resuelve.
📝 Errores comunes en el análisis de tiempos
Incluso con un diagrama de tiempos, los ingenieros pueden malinterpretar los datos. Varios errores comunes pueden provocar resultados falsos negativos o falsos positivos.
- Ignorar el jitter:La latencia de red o el desplazamiento del reloj pueden causar un ligero desplazamiento en los bordes de la señal. Un diagrama estático puede no capturar esta variabilidad.
- Ignorar los modos de energía: La CPU puede entrar en estados de suspensión de bajo consumo, alterando el tiempo de ejecución de las instrucciones y los tiempos de activación de interrupciones.
- Variabilidad del compilador: Diferentes niveles de optimización (-O0 frente a -O2) pueden reordenar instrucciones, cambiando el tiempo exacto de la sección crítica.
- Latencia del hardware: Los retrasos de los periféricos (por ejemplo, el tiempo de conversión del ADC) a menudo no se reflejan en los diagramas de tiempo del software, pero afectan el estado general del sistema.
🚀 Conclusión sobre el diagnóstico
Diagnosticar una condición de carrera requiere un cambio desde el análisis estático del código hasta la observación dinámica de señales. El diagrama de tiempo proporciona el contexto necesario para comprender cómo el tiempo interactúa con la lógica en un entorno concurrente. Al mapear el flujo de ejecución de la función principal contra la rutina de servicio de interrupciones, el momento exacto de la corrupción de datos se vuelve visible.
Una resolución efectiva implica seleccionar la estrategia de sincronización adecuada según las capacidades del hardware y los requisitos de rendimiento. Ya sea mediante instrucciones atómicas, enmascaramiento de interrupciones o rediseño arquitectónico, el objetivo permanece constante: garantizar que el estado compartido permanezca consistente independientemente del momento de ejecución.
A medida que los dispositivos IoT se vuelven más complejos y conectados, el margen de error se reduce. El análisis riguroso del tiempo no es solo un paso de depuración; es un componente crítico del ciclo de vida del desarrollo para sistemas embebidos confiables.