Die Entwicklung digitaler Systeme erfordert Präzision. Sie erstellen ein Zeitdiagramm, simulieren das Verhalten und erwarten, dass die physische Hardware exakt dem Bauplan folgt. In der Praxis treten jedoch oft Abweichungen auf. Signale kommen zu spät an, Pulse verschwinden oder Daten erscheinen beschädigt. Wenn Ihr Zeitdiagramm nicht mit dem Hardwareverhalten übereinstimmt, deutet dies auf eine Lücke zwischen dem theoretischen Modell und der physischen Realität hin. Diese Anleitung bietet einen strukturierten Ansatz zur Diagnose und Behebung dieser Diskrepanzen, ohne auf Hype oder unüberprüfte Kurzwege zurückzugreifen.
Die Divergenz zwischen Simulation und Silizium ist eine häufige ingenieurtechnische Herausforderung. Sie stammt oft von parasitären Effekten, Problemen bei der Clock-Verteilung oder falschen Annahmen über die Signalpropagation. Um diese Lücke zu schließen, benötigen Sie einen methodischen Debugging-Prozess. Dieser Artikel behandelt die Ursachen von Zeitabweichungen, diagnostische Techniken und Strategien, um Ihre Design-Entwicklung mit der tatsächlichen Hardware-Leistung abzustimmen.
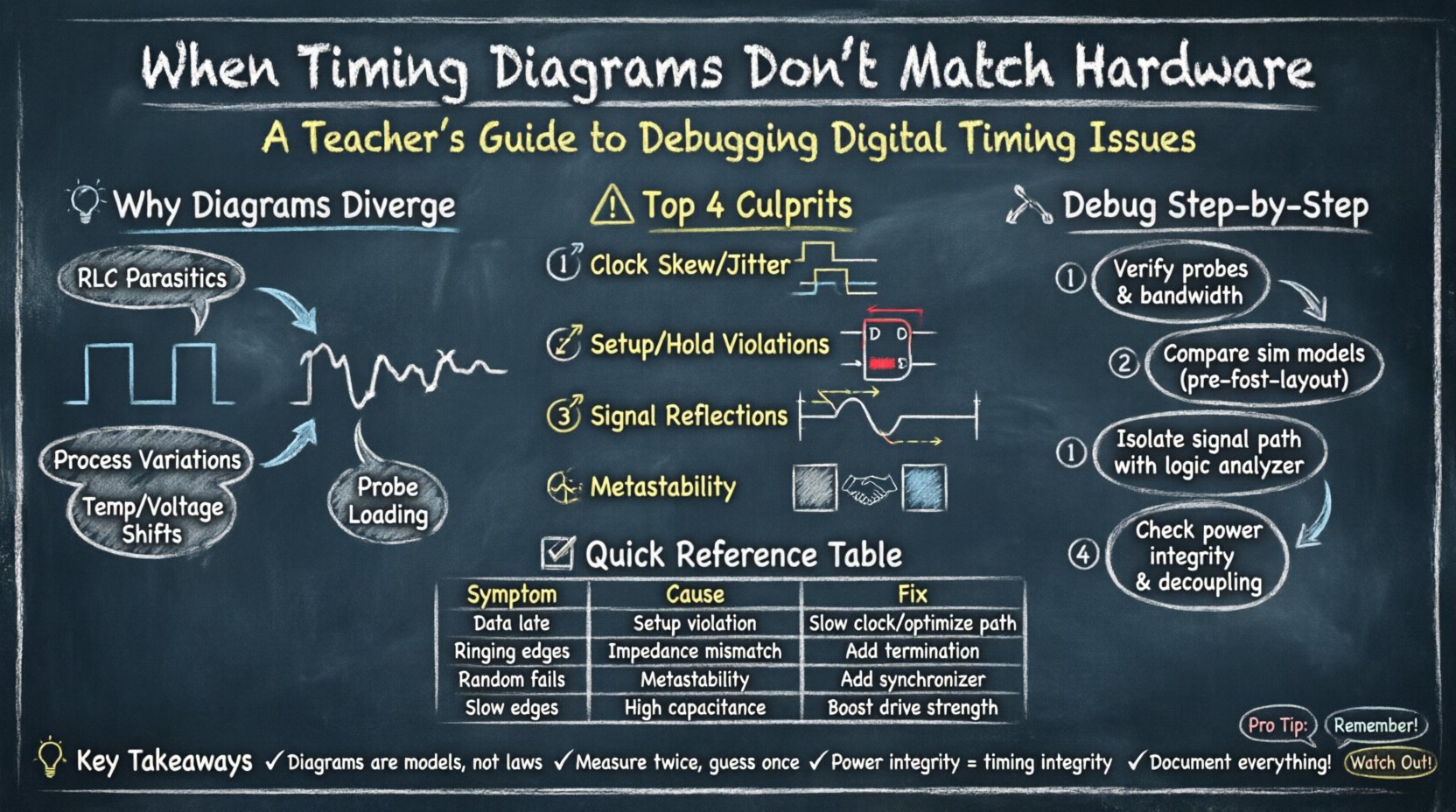
🧐 Warum Zeitdiagramme von der Realität abweichen 📉
Ein Zeitdiagramm stellt eine idealisierte Darstellung der Signalübergänge über die Zeit dar. Es geht von null Verzögerung, perfekten Kanten und unendlicher Bandbreite aus. Die Hardware arbeitet jedoch unter physischen Einschränkungen. Widerstand, Kapazität und Induktivität (RLC) beeinflussen jeden Spurverlauf auf einer Platine. Wenn das Diagramm diese Faktoren nicht berücksichtigt, verhält sich die Hardware anders.
- Ideales Modell vs. Reales Modell:Simulationswerkzeuge verwenden oft abstrakte Modelle, die die Propagierungsverzögerungen vereinfachen. Physikalische Boards bringen Abweichungen aufgrund der Spurlänge und des Materials mit sich.
- Prozessvariationen:Herstellungstoleranzen bedeuten, dass Transistoren auf einem einzigen Chip leicht unterschiedlich schnell schalten.
- Umweltfaktoren:Temperatur- und Spannungsfluktuationen verändern die Geschwindigkeit von Logikgattern.
- Messartefakte:Das Anstecken der Hardware führt zu einer Last, die Signale verlangsamen kann, die zuvor ausreichend schnell waren.
Das Verständnis dieser Unterschiede ist der erste Schritt. Wenn Sie das Zeitdiagramm als absolute Regel ansehen, anstatt als Vorhersage, werden Sie Schwierigkeiten haben, die eigentlichen Fehler zu finden. Das Ziel besteht darin, zu erkennen, wo das Modell versagt.
⏱ Häufige Ursachen von Zeitabweichungen ⚠️
Mehrere spezifische Mechanismen verursachen typischerweise die Diskrepanz zwischen Ihren Design-Erwartungen und der physischen Ausführung. Die Identifizierung des Verursachers erfordert die Isolierung von Variablen.
1. Clock-Skew und Jitter
Die Clock-Verteilung ist die Grundlage der synchronen Logik. In einem Diagramm ist die Clock-Kante oft eine senkrechte Linie. Auf einer Platine verbreitet sich die Clock-Kante. Clock-Skew tritt auf, wenn das Clock-Signal zu verschiedenen Zeitpunkten bei unterschiedlichen Registern eintrifft. Jitter bezeichnet die Variation der Clock-Periode.
- Globaler Skew:Der Clock-Pfad zu einem Register ist deutlich länger als zu einem anderen.
- Lokaler Skew:Unterschiede in der Lastkapazität auf benachbarten Clock-Netzen.
- Auswirkung:Wenn der Skew den Slack-Budget überschreitet, treten Setup- und Hold-Verletzungen auf, was zu Metastabilität führt.
2. Setup- und Hold-Zeit-Verletzungen
Flip-Flops erfordern, dass die Daten vor und nach der Clock-Kante stabil sind. Das Zeitdiagramm geht oft von perfekter Stabilität aus. Die Hardware offenbart die Wahrheit.
- Setup-Zeit-Verletzung:Die Daten kommen zu spät für den nächsten Clock-Zyklus an. Die Logik kann den Wert nicht korrekt erfassen.
- Hold-Zeit-Verletzung:Die Daten ändern sich zu früh nach der Clock-Kante. Der aktuelle Wert wird vor der Stabilisierung durch den neuen Eingang überschrieben.
- Diagnose: Überprüfen Sie die Propagierungsverzögerung der kombinatorischen Logik im Verhältnis zum Taktzyklus.
3. Signaltreue und Reflexionen
Hochgeschwindigkeitssignale verhalten sich wie Übertragungsleitungen. Wenn die Impedanz nicht abgeglichen ist, treten Reflexionen auf. Das Zeitdiagramm zeigt einen sauberen Übergang. Der Oszilloskop zeigt Ringe oder Überschwingen.
- Impedanzungleichheit:Spurbreite und Dielektrikumdicke beeinflussen die charakteristische Impedanz.
- Abschluss:Ohne korrekten Abschluss springen Signale zwischen Treiber und Empfänger hin und her.
- Kreuzkoppelung:Aggressives Schalten auf benachbarten Leitungen erzeugt Rauschen und verändert die wahrgenommene Zeitsteuerung der betroffenen Leitung.
4. Metastabilität bei asynchronen Schnittstellen
Beim Übergang zwischen Taktbereichen kann die Datenübertragung zu einem ungültigen Zeitpunkt eintreffen. Das Zeitdiagramm könnte ein Handshake-Protokoll zeigen. Die Hardware könnte hängen bleiben oder Müll-Daten erzeugen.
- Synchronisatoren:Verwenden Sie Mehrflop-Synchronisatoren, um die Wahrscheinlichkeit von Metastabilität zu verringern.
- Handshakes:Stellen Sie sicher, dass Anforderungs-/Bestätigungs-Signale eine ausreichende Setup-Zeit relativ zum Ziel-Takt haben.
- Zeitabstände:Asynchrone Signale erfordern eine sorgfältige Abstandsanalyse, um Beschädigungen zu vermeiden.
🔍 Diagnosemethodik: Schritt-für-Schritt-Analyse 🔬
Wenn eine Ungleichheit auftritt, raten Sie nicht. Folgen Sie einem strukturierten Debugging-Weg. Dadurch stellen Sie sicher, dass Sie die Ursache, nicht nur die Symptome, angehen.
Schritt 1: Überprüfen Sie die Messanordnung
Bevor Sie das Design beschuldigen, bestätigen Sie die Messkette. Sonden haben Kapazität. Eine hochohmige Sonde kann die Schaltung belasten.
- Sondenausgleich:Stellen Sie sicher, dass die Sonden für den Frequenzbereich korrekt ausgeglichen sind.
- Masseleitungen:Lange Masseleitungen wirken wie Antennen und führen zu Induktivität. Verwenden Sie Massefedern für Hochgeschwindigkeitssignale.
- Bandbreite:Stellen Sie sicher, dass die Bandbreite des Oszilloskops mindestens 5-mal höher ist als die Signal-Frequenz.
Schritt 2: Vergleichen Sie Simulationsmodelle
Überprüfen Sie die in der Simulationsumgebung verwendeten Einschränkungen. Stimmen sie mit der physischen Anordnung überein?
- Bibliotheksmodelle: Überprüfen Sie, ob die Simulation typische, schlechteste oder beste Fallmodelle verwendet.
- Parasitäre Effekte: Haben Sie post-layout parasitäre Effekte extrahiert? Eine Vorlayout-Simulation ignoriert Spurwiderstand und -kapazität.
- Einschränkungen: Stellen Sie sicher, dass die Taktdaten in der Einschränkungsdatei mit der tatsächlichen Taktsquelle übereinstimmen.
Schritt 3: Signalpfad isolieren
Identifizieren Sie die spezifischen Signale, die das Problem verursachen. Verwenden Sie einen Logikanalysator oder Oszilloskop, um die Wellenform zu erfassen.
- Togglerate: Toggeln die Signale mit der erwarteten Frequenz?
- Anstiegs-/Abfallzeiten: Messen Sie die Steilheit der Flanken. Langsame Flanken deuten auf hohe Last oder Schwächen der Treibkraft hin.
- Glitches: Suchen Sie nach transienten Impulsen, die die Logik falsch auslösen könnten.
Schritt 4: Analyse von Stromversorgung und Masse
Die Stromversorgungsintegrität wird oft übersehen. Spannungsabfall beeinflusst die Schaltgeschwindigkeit.
- Entkopplung: Stellen Sie sicher, dass Kondensatoren nahe an den Stromversorgungsanschlüssen platziert sind.
- Masse-Sprung:Schaltströme können die Massebezugsspannung anheben und die Logikschwellen verändern.
- Versorgungsrauschen: Überprüfen Sie auf Rauschkopplung von Schaltreglern in empfindliche analoge oder digitale Bereiche.
📊 Häufige Zeitverzögerungsfehler und Lösungstabelle 🛠
Verwenden Sie diese Referenztabelle, um potenzielle Probleme schnell basierend auf beobachteten Symptomen zu identifizieren.
| Beobachtetes Symptom | Wahrscheinliche Ursache | Verifizierungsmethode | Empfohlene Korrektur |
|---|---|---|---|
| Daten kommen zu spät an | Setup-Zeit-Verletzung | Überprüfen Sie die Propagierungsverzögerung im Vergleich zur Taktfrequenzperiode | Verlangsamen Sie den Takt oder optimieren Sie den Logikpfad |
| Daten ändern sich zu früh | Hold-Zeit-Verletzung | Überprüfen Sie die minimale Verzögerung der kombinatorischen Logik | Fügen Sie Verzögerungspuffer hinzu oder redesignieren Sie den Pfad |
| Signalränder sind langsam | Hohe kapazitive Last | Messung der Anstiegszeit mit Oszilloskop | Verkürzen Sie die Spuränge oder erhöhen Sie die Treibstärke |
| Ringing an den Kanten | Impedanzungleichheit | Prüfen Sie die Wellenform auf Überschwingen | Reihenabschlusswiderstand anwenden |
| Zufällige Ausfälle | Metastabilität | Überprüfen Sie asynchrone Handshakes | Synchronisierungsstufen hinzufügen |
| Periodische Fehler | Taktjitter | Analyse des Taktspektrums | Verbessern Sie die PLL-Konfiguration oder die Stromversorgungsfilterung |
| Intermittierende Störungen | Kreuzkoppelung | Überprüfen Sie die Aktivität benachbarter Leitungen | Abstand erhöhen oder Abschirmung hinzufügen |
| Logik steckt niedrig/hoch | Stromversorgungs-/Masseproblem | Überwachen Sie die Versorgungsspannungsleitungen | Verbessern Sie die Entkopplung oder die Massefläche |
🧩 Erweiterte Szenarien und Feinheiten 🔎
Jenseits der Grundlagen bringen komplexe Systeme spezifische Herausforderungen mit sich, die eine tiefere Analyse erfordern.
Multi-Domain-Taktsynchronisation
Systeme laufen oft mit mehreren Frequenzen. Die Synchronisierung von Daten zwischen 100 MHz und 200 MHz Bereichen ist nicht einfach. Das Zeitdiagramm könnte eine einfache Pfeil darstellen. Hardware erfordert ein Handshake-Protokoll.
- FIFOs: Verwenden Sie asynchrone FIFOs für große Datenblöcke.
- Gray-Codes: Verwenden Sie Gray-Codes beim Übergang von Zeigern, um sicherzustellen, dass nur ein Bit wechselt.
- Phasenabstimmung: Wenn die Takte miteinander verbunden sind, stellen Sie sicher, dass die Phasen abgestimmt sind, um das Abtasten an der falschen Flanke zu vermeiden.
Temperatur- und Spannungsecken
Die Simulation läuft normalerweise bei Nennbedingungen. Die Hardware arbeitet in einem Bereich. Ein Entwurf, der bei 25 °C funktioniert, könnte bei 85 °C versagen.
- Langsam-Langsam-Ecke:Worst-Case für die Setup-Zeit (langsamste Transistoren).
- Schnell-Schnell-Ecke:Worst-Case für die Hold-Zeit (schnellste Transistoren).
- Validierung: Testen Sie die Hardware über den gesamten Betriebstemperatur- und Spannungsbereich hinweg.
Einfluss der Messsonde
Dies ist eine häufige Quelle für falsch-negative Ergebnisse. Wenn Sie eine Sonde anschließen, fügen Sie Kapazität hinzu. Ein Knoten, der in der Simulation umschaltet, könnte in der Realität langsamer werden, weil die Sonde ihn belastet.
- Aktive Sonden: Verwenden Sie aktive Sonden mit geringerer Kapazität für Hochgeschwindigkeitsknoten.
- Nicht-störend: Wo möglich, verwenden Sie interne Debug-Logik anstelle physischer Sonden.
- Abschätzung: Berechnen Sie die hinzugefügte Kapazität und prüfen Sie, ob sie die Treiberkapazität überschreitet.
🛡 Vorbeugestrategien für zukünftige Entwürfe 🛡
Sobald Sie das aktuelle Problem behoben haben, wenden Sie diese Strategien an, um eine Wiederholung zu verhindern.
1. Frühe Zeitplanung
Warten Sie nicht, bis die Platine gebaut ist, um die Zeitplanung zu überprüfen. Führen Sie die statische Zeitplanungsanalyse (STA) früh im Entwurfsprozess durch.
- Schrittweise Aktualisierungen:Aktualisieren Sie die Einschränkungen, während sich das Design weiterentwickelt.
- Berichtsanalyse:Analysieren Sie regelmäßig Zeitverlaufberichte für kritische Pfade.
- Einschränkungsdateien:Stellen Sie genaue SDC- oder gleichwertige Einschränkungsdateien bereit.
2. Robuste Leiterplatten-Layout
Das physische Design bestimmt die Zeitverhaltensleistung.
- Schichtaufbau:Definieren Sie Schichten mit kontrollierter Impedanz.
- Längenabgleich:Passen Sie die Längen für Differenzpaare und Bussysteme an.
- Vias minimieren:Verringern Sie die Anzahl von Vias auf Hochgeschwindigkeitsleitungen, um Unterbrechungen zu minimieren.
3. Design für Testbarkeit
Bauen Sie Funktionen ein, die es Ihnen ermöglichen, interne Zustände zu beobachten.
- Scan-Ketten:Verwenden Sie Scan-Ketten, um Zustände zur Fehlersuche auszugeben.
- Schleifenrückführungen:Aktivieren Sie Schleifenrückführungsmodi zur Prüfung der Signalintegrität.
- Debug-Schnittstellen:Stellen Sie ausgewählte Signale an externen Pins für die Logikanalyse zur Verfügung.
4. Dokumentation
Führen Sie klare Dokumentation der Zeitannahmen.
- Zeitverlaufberichte:Archivieren Sie Berichte für jede Version.
- Einschränkungsnotizen:Dokumentieren Sie, warum bestimmte Einschränkungen gewählt wurden.
- Hardware-Notizen:Notieren Sie das tatsächliche Verhalten des Prototyps für zukünftige Referenzen.
🔄 Prozess der iterativen Fehlersuche 🔄
Die Fehlersuche verläuft selten linear. Sie werden wahrscheinlich diese Schritte mehrfach durchlaufen.
- Symptom definieren:Seien Sie präzise. „Daten sind falsch“ reicht nicht aus. „Bit 3 ist am steigenden Flankenausgang invertiert“ ist handlungsleitend.
- Hypothesieren:Entwickeln Sie eine Theorie basierend auf dem Zeitdiagramm und dem Hardware-Verhalten.
- Testen:Ändern Sie jeweils nur eine Variable. Passen Sie Einschränkungen an, fügen Sie Verzögerungen hinzu oder ändern Sie die Messpunkte.
- Messen:Erfassen Sie das neue Verhalten. Vergleichen Sie es mit der Hypothese.
- Verfeinern:Wenn die Hypothese falsch ist, verwerfen Sie sie und bilden Sie eine neue.
Diese iterative Schleife verhindert, dass Sie steckenbleiben. Sie zwingt zu objektiven Beobachtungen statt zu einer Überzeugungsbestätigung. Oft liegt das Problem nicht in der Logik, sondern in der Umgebung oder dem Messinstrument.
📝 Zusammenfassung der wichtigsten Erkenntnisse 📝
- Zeitdiagramme sind Modelle, keine Gesetze.Sie vereinfachen die Realität und können parasitäre Effekte auslassen.
- Physische Effekte sind wichtig.Spuränge, Impedanz und Lastkapazität verändern das Signalverhalten.
- Die Messqualität ist entscheidend.Sonden können die Schaltung verändern, die sie messen.
- Die statische Zeitanalyse ist unerlässlich.Sie erkennt Verstöße vor der Herstellung der Hardware vorher.
- Isolieren Sie Variablen.Ändern Sie jeweils nur eine Sache, um die Ursache zu identifizieren.
- Die Stromversorgungsintegrität ist Teil der Zeitplanung.Spannungsabfall beeinflusst die Schaltgeschwindigkeit.
- Dokumentieren Sie alles.Das Wissen, das während der Fehlersuche gewonnen wird, ist wertvoll für das nächste Projekt.
Die Lösung einer Zeitverzögerung erfordert Geduld und technische Sorgfalt. Es gibt keine magischen Werkzeuge, die die physikalische Realität beheben. Doch durch das Verständnis der Physik der Signalübertragung und die Einhaltung eines disziplinierten Fehlersuchprozesses können Sie Ihr Design mit den Erwartungen der Hardware ausrichten. Diese Ausrichtung gewährleistet Zuverlässigkeit und Leistung im Endprodukt.
Bleiben Sie dabei, Ihr Verständnis von Signalintegrität und Zeitplanung zu verfeinern. Je schneller und dichter die Systeme werden, desto kleiner wird der Fehlermarge. Ein tiefes Verständnis dieser Fehlerbehebungstechniken wird Ihre Designs widerstandsfähig gegenüber den Komplexitäten moderner Elektronik halten.