在嵌入式系統與物聯網(IoT)架構的複雜世界中,時序不僅僅是一個指標;它是一項基本的限制條件,決定了系統的穩定性。當多個執行緒或中斷同時嘗試存取共享資源時,競態條件的風險便會出現。本指南將技術性地探討如何利用時序圖診斷此類同步問題。我們將探討並發執行的機制,分析信號轉換,並識別邏輯偏離預期行為的精確時刻。
🧩 理解嵌入式系統中的並發性
物聯網裝置通常在嚴格的電力與運算限制下運作。為了最大化效率,開發人員經常實作並發流程。這表示中央處理單元(CPU)看似同時處理多項任務,例如感測器輪詢、網路傳輸與執行器控制。然而,單核心微控制器中真正的平行運作極為罕見。相反地,快速的上下文切換創造了同時性的錯覺。
- 共享記憶體:中斷服務例行程序(ISR)與主迴圈均可存取的變數。
- 硬體外設:用於 UART、SPI 或 I2C 通訊的暫存器。
- 狀態機:根據外部觸發訊號進行轉換的邏輯。
當這些元件在缺乏適當同步機制的情況下互動時,系統狀態將變得非確定性。當某個程序的結果取決於未保證以特定順序發生的事件之間的相對時序時,就會發生競態條件。
📊 時序圖在除錯中的角色 🛠️
時序圖是信號在明確定義的時間軸上的視覺化表示。在除錯的脈絡中,它扮演著鑑識工具的角色。與靜態程式碼審查不同,時序圖能捕捉硬體與軟體互動的動態行為。它讓工程師能夠觀察延遲、抖動以及重疊的執行時間窗。
時序圖的關鍵元件
| 元件 | 描述 | 與競態條件的相關性 |
|---|---|---|
| 時間軸 | 代表時間長度的水平線(納秒、微秒、毫秒) | 建立事件的順序 |
| 信號線 | 代表特定接腳或變數的垂直線 | 顯示高/低狀態或資料變更 |
| 轉換 | 信號狀態變化的邊緣(上升/下降) | 標示中斷的觸發點 |
| 延遲標記 | 觸發與回應之間的延遲 | 揭露處理瓶頸 |
🏭 案例研究情境:智慧電表
考慮一個用於測量電壓和電流脈衝的物聯網電能計。該裝置必須將這些脈衝記錄到非揮發性記憶體,同時透過蜂窩模組將摘要封包傳送到雲端閘道。系統架構包含一個主要應用程式迴圈,以及由電壓閾值穿越觸發的硬體中斷。
系統規格
- 微控制器: 基於32位元ARM Cortex-M4的處理器
- 共用資源: RAM 中的一個4位元組計數器變數
- 中斷來源: 外部電壓比較器
- 主迴圈任務: 定期的資料聚合與傳輸
預期的邏輯很簡單:當發生電壓尖峰時,中斷會增加計數器的值。主迴圈讀取計數器,傳輸其值,並將其重設為零。在正常負載下,這一切運作正常。然而,在高負載條件下,資料會出現損壞。
📈 分析訊號流程
為了診斷此問題,我們建立一個時序圖,專注於中斷服務程式(ISR)與主迴圈之間的互動。此圖呈現了CPU的執行流程、共用計數器的訊號狀態,以及周邊資料匯流排的狀態。
階段1:讀取-修改-寫入循環
競態條件的核心在於讀取-修改-寫入(RMW)序列。此操作在許多架構上並非原子性。它包含三個不同的步驟:
- 讀取: CPU 從記憶體中取得目前的值。
- 修改: CPU 將寄存器值加一。
- 寫入: CPU 將新值寫回記憶體。
如果中斷發生在步驟1與步驟3之間,資料的完整性將受到損害。讓我們檢視此事件的時序圖表示。
時序圖可視化
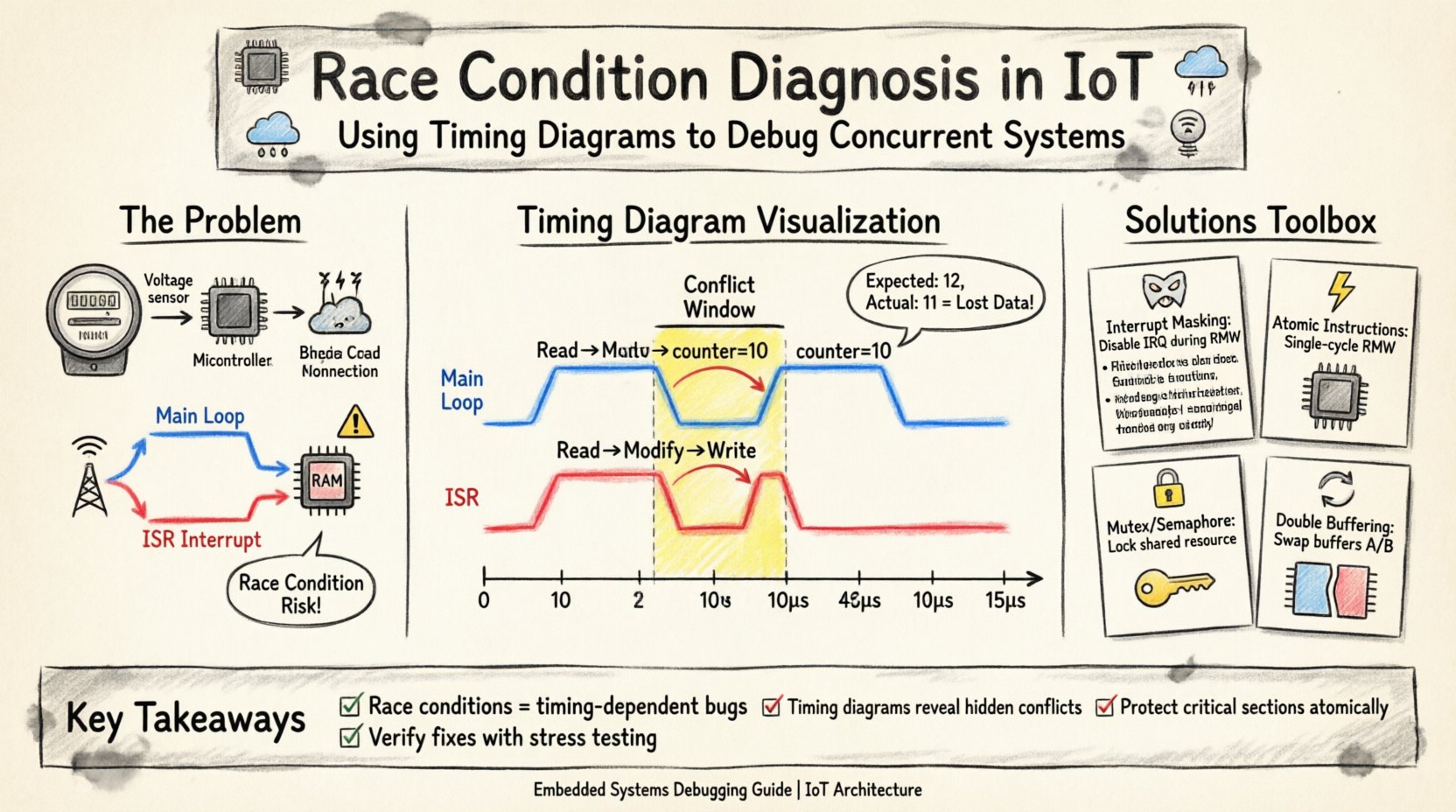
| 時間(μs) | 主迴圈 | 中斷服務程式(ISR) | 共用計數器值 |
|---|---|---|---|
| 0 | 讀取計數器(值:10) | 閒置 | 10 |
| 2 | 暫存器儲存值為 10 | 中斷觸發 | 10 |
| 5 | 修改 (10 + 1 = 11) | 讀取計數器 (值: 10) | 10 |
| 8 | 中斷待處理 | 修改 (10 + 1 = 11) | 10 |
| 10 | 寫入 (11) | 寫入 (11) | 11 |
| 12 | 重設計數器 (0) | 返回中斷 | 0 |
| 15 | 週期結束 | 返回主迴圈 | 0 |
注意最終值的差異。主迴圈與 ISR 都讀取了該值10。兩者都加一,結果為11。主迴圈寫入 11。ISR 則覆蓋此值為 11。最終結果計數為 11,但應為 12。ISR 檢測到的脈衝實際上遺失了,因為主迴圈正處於處理前一個計數的過程中。
🔍 识别衝突窗口
時序圖使衝突窗口變得可見。這是指主迴圈讀取變數與寫入新值之間的時間間隔。在此特定架構中,該週期約為8微秒。中斷延遲必須短於此窗口,才會發生競態條件。
影響窗口的因素
- 時鐘頻率:較高的頻率會縮短RMW週期的實際時間。
- 記憶體延遲:SRAM或快閃記憶體中的等待狀態會延長讀寫時間。
- 編譯器優化:內聯或暫存器配置可能會改變指令執行時間。
- 中斷優先級: 如果中斷優先級低於主迴圈中的關鍵區段,競態可能被隱藏。
透過使用邏輯分析儀或片上效能監控器測量實際的時鐘週期,工程師可以計算出精確的暴露窗口。此數據對於判斷簡單的軟體修復是否可行,或是否需要硬體介入至關重要。
🛡️ 解決策略
一旦透過時序分析確認了競態條件,就需要進行特定的架構變更。目標是確保關鍵區段(RMW操作)能原子式執行,或免於中斷干擾。
1. 中斷屏蔽
最直接的方法是在關鍵區段期間關閉中斷。這可確保在主迴圈更新共享變數時,沒有任何中斷服務程式能搶佔執行。
- 實作: 使用組合語言指令,在讀取前清除中斷使能旗標,並在寫入後重新設定。
- 優點:無需複雜的資料結構即可確保原子性。
- 缺點: 會增加所有其他外設的中斷延遲。高優先級中斷可能被延遲,影響即時性能。
2. 原子指令
現代處理器通常提供硬體支援原子操作。這些指令能在單一不可分割的機器週期內完成讀取-修改-寫入序列。
- 實作: 使用對應至原子比較並交換(CAS)或取得並增加指令的函式庫函數或內建函數。
- 優點: 性能開銷極小;無需關閉全域中斷。
- 缺點: 取決於硬體;並非所有舊型微控制器都支援。
3. 軟體鎖定(互斥鎖/信號量)
對於更複雜的共享資源,例如通訊緩衝區,需要使用鎖定機制。這可確保每次僅有一個執行緒或程序存取該資源。
- 實作:記憶體中的一個旗標,用以表示資源正在使用中。主迴圈會檢查此旗標;中斷服務程式在嘗試存取前也會檢查該旗標。
- 優點:彈性高;可允許任務優先順序的設定。
- 缺點:會引入上下文切換的額外負擔,若未妥善管理,還可能導致死鎖。
4. 雙緩衝
在資料傳輸情境中,雙緩衝技術可消除寫入階段的同步需求。主迴圈寫入緩衝區A,同時中斷服務程式從緩衝區B讀取資料。
- 實作:維持兩個獨立的記憶體區域。當一個完整資料區塊準備就緒時,交換兩者的指標。
- 優點:可防止傳輸過程中的資料損壞;使資料生產與消耗彼此解耦。
- 缺點:記憶體使用量加倍;需謹慎管理指標。
🔄 驗證與測試
套用修復措施後,必須重新產生時序圖以驗證解決方案。目標是確認主迴圈與中斷服務程式臨界區段之間的重疊已完全消除。
測試流程
- 壓力測試:最大化中斷頻率與主迴圈負載,以引發最壞情況。
- 日誌分析:將計數器值與已知基準值(例如外部脈衝產生器)進行比對。
- 訊號擷取:在壓力測試期間記錄時序圖,以確認衝突窗口不存在。
若時序圖顯示中斷服務程式在主迴圈存取變數前已完全執行,或變數在切換期間處於鎖定狀態,則競態條件已解決。
📝 時序分析中的常見陷阱
即使擁有時序圖,工程師仍可能誤解資料。多種常見錯誤可能導致錯誤的負面結果或錯誤的正面結果。
- 忽略抖動:網路延遲或時鐘漂移可能導致訊號邊緣略微偏移。靜態圖表可能無法捕捉這種變異性。
- 忽略電源模式: CPU 可能進入低功耗睡眠狀態,改變指令執行時間與中斷喚醒時間。
- 編譯器差異: 不同的優化等級(-O0 對 -O2)可能會重新排列指令,改變臨界區的精確時間。
- 硬體延遲: 外設延遲(例如 ADC 轉換時間)通常不會反映在軟體時序圖中,但會影響整體系統狀態。
🚀 診斷結論
診斷競態條件需要從靜態程式碼分析轉向動態信號觀察。時序圖提供了必要的上下文,以理解時間如何與並發環境中的邏輯相互作用。透過將主迴圈的執行流程與中斷服務例行程序進行對照,資料損壞的精確時刻便會顯現。
有效的解決方案需要根據硬體能力與效能需求,選擇適當的同步策略。無論是透過原子指令、中斷遮蔽,還是架構重設計,目標始終一致:確保共享狀態在任何執行時間下都保持一致。
隨著物聯網裝置變得更複雜且相互連接,容錯空間不斷縮小。嚴謹的時序分析不僅是除錯步驟,更是可靠嵌入式系統開發週期中的關鍵組成部分。