デジタルシステムを設計するには正確さが求められます。タイミング図を作成し、動作をシミュレートして、物理的なハードウェアが設計図通りに動作すると期待します。しかし実際には、しばしば違いが生じます。信号が遅れて到着したり、パルスが消えたり、データが破損したように見えることがあります。タイミング図がハードウェアの動作と一致しない場合、それは理論モデルと物理的現実との間にギャップがあることを示しています。このガイドは、誇張や検証されていないテクニックに頼らず、こうした不一致を構造的に診断・解決するためのアプローチを提供します。
シミュレーションとシリコン(実際のチップ)との乖離は、一般的なエンジニアリングの課題です。これはしばしばパラサイト効果、クロック配布の問題、または信号伝播に関する誤った仮定に起因します。このギャップを埋めるには、体系的なデバッグプロセスが必要です。この記事では、タイミングのずれの根本原因、診断手法、設計を実際のハードウェア性能に合わせるための戦略について取り上げます。
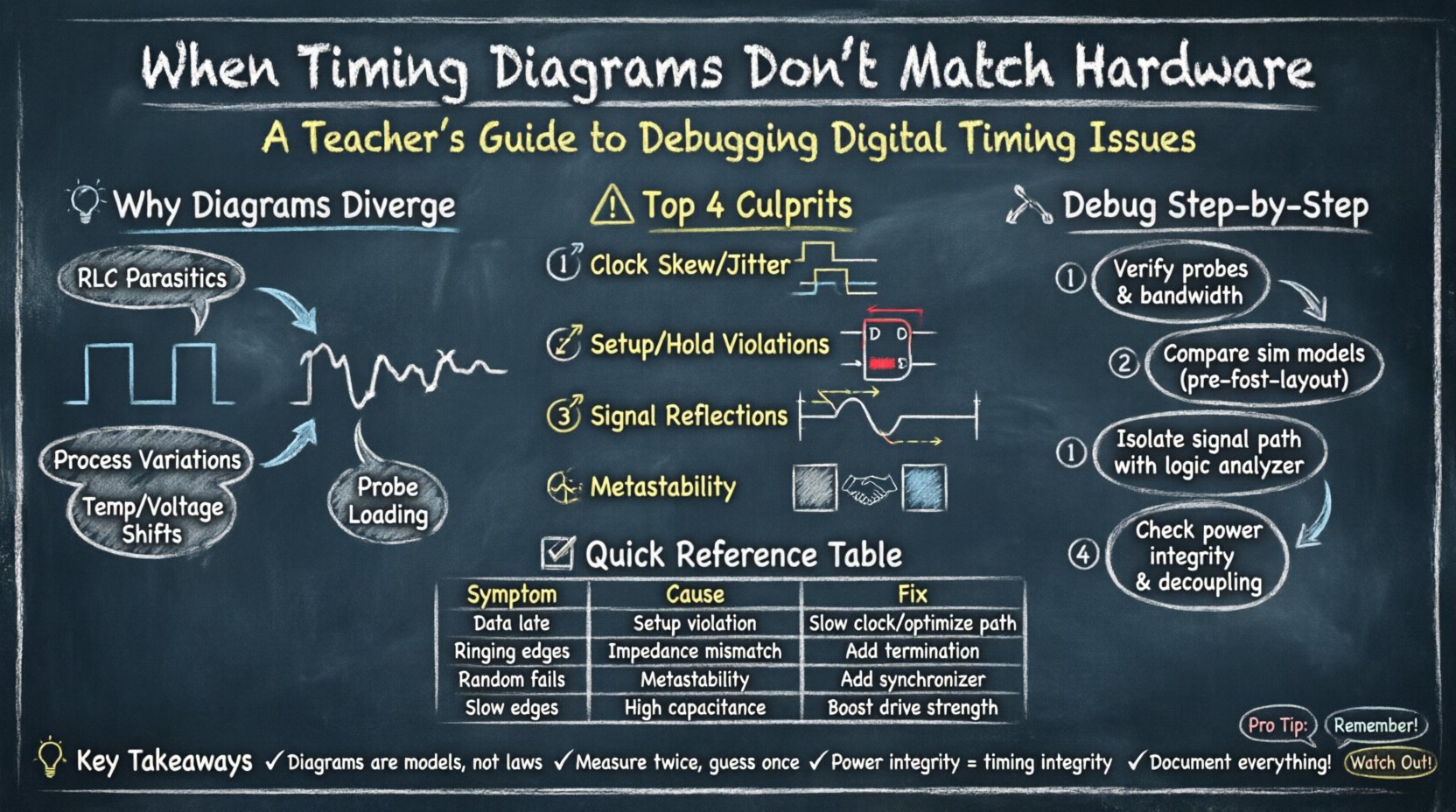
🧐 なぜタイミング図は現実から逸れるのか 📉
タイミング図は、時間の経過に伴う信号遷移を理想化した視点を表します。ゼロ遅延、完璧なエッジ、無限の帯域幅を前提としています。しかしハードウェアは物理的制約の下で動作します。抵抗、静電容量、インダクタンス(RLC)は、基板上のすべてのトレースに影響を与えます。図がこれらの要因を考慮しない場合、ハードウェアの動作は異なるものになります。
- 理想モデル vs. 実際のモデル:シミュレーションツールはしばしば、伝播遅延を簡略化した抽象モデルを使用します。実際の基板では、トレースの長さや素材によってばらつきが生じます。
- プロセスのばらつき:製造公差のため、1つのチップ内でトランジスタのスイッチング速度がわずかに異なります。
- 環境要因:温度や電圧の変動が、論理ゲートの動作速度を変化させます。
- 測定の誤差:プローブによる測定ハードウェアは負荷を加え、以前は十分速かった信号を遅くしてしまうことがあります。
これらの違いを理解することが第一歩です。タイミング図を予測ではなく絶対法則として扱うと、実際の不具合を見つけるのが難しくなります。目標は、モデルがどこで破綻するかを特定することです。
⏱ タイミングのずれの主な原因 ⚠️
設計の期待と物理的実行との間にずれを生じさせる、いくつかの特定のメカニズムが一般的にあります。原因を特定するには、変数を分離する必要があります。
1. クロックスキーとジッター
クロック配布は同期論理の基盤です。図ではクロックエッジはしばしば垂直線として描かれます。実際の基板上では、クロックエッジは広がります。クロック信号が異なるレジスタに異なるタイミングで到着する場合、クロックスキーが発生します。ジッターとは、クロック周期の変動を指します。
- グローバルスキー:1つのレジスタへのクロックパスが、他のレジスタへのものよりも著しく長い。
- ローカルスキー:隣接するクロックネットにおける負荷静電容量の違い。
- 影響:スキーがスラック予算を超えると、セットアップ違反およびホールド違反が発生し、メタスタビリティに至る。
2. セットアップ時間およびホールド時間の違反
フリップフロップは、クロックエッジの前後でデータが安定している必要があります。タイミング図では、完全な安定性を仮定することが多いですが、ハードウェアが真実を明らかにします。
- セットアップ時間の違反:データが次のクロックサイクルに間に合わない。論理回路が値を正しくキャプチャできなくなる。
- ホールド時間の違反:データがクロックエッジの直後に早すぎることで変化する。現在の値が安定する前に、新しい入力によって上書きされる。
- 診断:組み合わせ論理回路の伝播遅延がクロック周期と一致しているか確認する。
3. シグナルインテグリティと反射
高速信号は伝送線路のように振る舞う。インピーダンスが一致しない場合、反射が発生する。タイミング図ではクリーンな遷移が示されるが、オシロスコープではリングやオーバーシュートが観測される。
- インピーダンス不一致:トレース幅と誘電体厚さは特性インピーダンスに影響を与える。
- 終端処理:適切な終端処理が行われない場合、信号はドライバとレシーバの間を跳ね返る。
- クロストーク:隣接するネットでの急激なスイッチングがノイズを発生させ、被害ネットの認識されるタイミングを変更する。
4. 異種クロックインターフェースにおけるメタスタビリティ
クロックドメインを跨ぐ際、データが無効なタイミングで到着する可能性がある。タイミング図にはハンドシェイクプロトコルが示されることがある。ハードウェアが停止したり、ゴミデータを出力する可能性がある。
- 同期器:メタスタビリティの確率を低下させるために、マルチフロップ同期器を使用する。
- ハンドシェイク:リクエスト/アックノリッジ信号が宛先クロックに対して十分なセットアップ時間を確保していることを確認する。
- タイミングマージン:非同期信号は、破損を防ぐために慎重なマージン解析が必要である。
🔍 診断手法:ステップバイステップの分析 🔬
不一致が発生した際は、推測しないでください。構造的なデバッグ手順に従ってください。これにより、症状ではなく根本原因に対処できることが保証されます。
ステップ1:測定設定の確認
設計のせいにする前に、測定チェーンを確認してください。プローブには静電容量がある。高インピーダンスプローブは回路に負荷をかける可能性がある。
- プローブ補償:プローブが周波数範囲に適切に補償されていることを確認する。
- グランドリード:長いグランドリードはアンテナのように働き、インダクタンスを導入する。高速信号にはグランドスプリングを使用する。
- 帯域幅:オシロスコープの帯域幅が信号周波数の少なくとも5倍以上であることを確認する。
ステップ2:シミュレーションモデルの比較
シミュレーション環境で使用された制約を確認する。物理レイアウトと一致しているか?
- ライブラリモデル: シミュレーションが通常値、最悪ケース、または最良ケースのモデルを使用しているか確認してください。
- パラシティックス: レイアウト後のパラシティックスを抽出しましたか?レイアウト前シミュレーションではトレースの抵抗および静電容量が無視されます。
- 制約: 制約ファイル内のクロック定義が実際のクロックソースと一致しているか確認してください。
ステップ3:信号経路を特定する
問題を引き起こしている特定の信号を特定してください。ロジックアナライザーやオシロスコープを使用して波形をキャプチャしてください。
- トグルレート: 信号は想定された周波数でトグルしていますか?
- 立ち上がり/立ち下がり時間: エッジの急峻さを測定してください。緩やかなエッジは高負荷または駆動力不足を示しています。
- ギャップ: 論理を誤ってトリガーする可能性のある一時的なパルスを探してください。
ステップ4:電源とグランドを分析する
電源インテグリティはしばしば見過ごされます。電圧ドロップはスイッチング速度に影響します。
- デカップリング: コンデンサが電源ピンに近い位置に配置されていることを確認してください。
- グランドバウンス: スイッチング電流によりグランド基準が上昇し、論理閾値が変化する可能性があります。
- 供給ノイズ: スイッチングレギュレータから感度の高いアナログまたはデジタル回路にノイズがカップリングしていないか確認してください。
📊 一般的なタイミングエラーとその解決策の表 🛠
観察された症状に基づいて潜在的な問題を素早く特定するための参照表です。
| 観察された症状 | 可能性のある原因 | 検証方法 | 推奨される修正 |
|---|---|---|---|
| データが遅れて到着する | セットアップ時間違反 | プロパゲーション遅延とクロック周期の確認 | クロックを遅くするか、論理パスを最適化する |
| データが早すぎるように変化している | ホールド時間違反 | 組み合わせ論理の最小遅延を確認する | 遅延バッファを追加するか、パスを再設計する |
| 信号エッジが遅い | 高容量負荷 | オシロスコープで立ち上がり時間を測定する | トレース長を短くするか、駆動力を増加させる |
| エッジにリング | インピーダンス不一致 | オーバーシュートの有無を波形で確認する | 直列終端抵抗を適用する |
| ランダムな障害 | メタスタビリティ | 非同期ハンドシェイクを確認する | 同期化ステージを追加する |
| 周期的なエラー | クロックジッター | クロックスペクトルを分析する | PLLの設定を改善するか、電源フィルタリングを強化する |
| 断続的なグルーチス | クロストーク | 隣接するネットの活動状況を確認する | 間隔を広げるか、シールドを追加する |
| 論理が低/高に固定されている | 電源/グラウンドの問題 | 電源電圧レールをモニタリングする | デカップリングを改善するか、グラウンドプレーンを強化する |
🧩 高度なシナリオとニュアンス 🔎
基本を越えて、複雑なシステムは特定の課題をもたらし、より深い分析を必要とする。
マルチドメインクロッキング
システムはしばしば複数の周波数で動作する。100MHzと200MHzのドメイン間でデータを同期することは簡単ではない。タイミング図には単純な矢印が示されるかもしれないが、ハードウェアではハンドシェイクプロトコルが必要となる。
- FIFOs: 大きなデータブロックには非同期FIFOを使用する。
- グレイコード: ポインタのクロスングにはグレイコードを使用し、1ビットだけが変化することを保証する。
- 位相同期: クロックが関連している場合、誤ったエッジでサンプリングしないように位相同期を確保する。
温度と電圧のコーナー
シミュレーションは通常、ノーマル条件で実行される。ハードウェアは範囲内で動作する。25°Cで動作する設計が85°Cでは失敗する可能性がある。
- スロー・スロー・コーナー: ライズタイムの最悪ケース(最も遅いトランジスタ)。
- ファスト・ファスト・コーナー: ホールドタイムの最悪ケース(最も速いトランジスタ)。
- 検証: ハードウェアを全範囲の動作温度および電圧範囲でテストする。
プローブ負荷効果
これは誤った否定結果の頻発原因となる。プローブを接続すると、静電容量が増加する。シミュレーションではトグルするノードが、プローブの負荷により実際には遅くなることがある。
- アクティブプローブ: 高速ノードには静電容量が低いアクティブプローブを使用する。
- 非侵襲的: 可能な限り、物理的なプローブの代わりに内部のデバッグ論理を使用する。
- 推定: 追加される静電容量を計算し、ドライバの能力を超えていないか確認する。
🛡 今後の設計における予防戦略 🛡
現在の問題を修正したら、これらの戦略を適用して再発を防ぐ。
1. 早期のタイミングクロージャ
ボードが完成してからタイミングを確認するのではなく、設計フローの初期段階で静的タイミング解析(STA)を実行する。
- 段階的更新:設計の進化に伴い、制約を更新する。
- レポート分析:クリティカルパスのタイミングレポートを定期的に確認する。
- 制約ファイル:正確なSDCまたは同等の制約ファイルを維持する。
2. ロバストなPCBレイアウト
物理設計がタイミング性能を決定する。
- レイヤースタックアップ:制御インピーダンス層を定義する。
- 長さの一致:差動ペアおよびバスの長さを一致させる。
- ビアの最小化:高速ライン上のビアを減らして不整合を最小限に抑える。
3. テスト性を考慮した設計
内部状態を観察できる機能を構築する。
- スキャンチェーン:スキャンチェーンを使用して状態をシフトアウトし、デバッグを行う。
- ループバック:信号整合性テスト用にループバックモードを有効にする。
- デバッグポート:論理解析用に特定の信号を外部ピンに露出させる。
4. ドキュメント化
タイミングの仮定について明確なドキュメントを維持する。
- タイミングレポート:すべてのバージョンについてレポートをアーカイブする。
- 制約ノート:特定の制約を選択した理由を文書化する。
- ハードウェアノート:プロトタイプの実際の動作を記録し、将来の参照用とする。
🔄 反復的なデバッグプロセス 🔄
デバッグはほとんど線形的ではありません。これらのステップを何度も繰り返す可能性が高いです。
- 症状を定義する:具体的に述べる。「データが間違っている」では不十分です。「ビット3が立ち上がりエッジで反転している」は対処可能な情報です。
- 仮説を立てる:タイミング図とハードウェアの挙動に基づいて理論を構築する。
- 検証する:変数を1つずつ変更する。制約を変更したり、遅延を追加したり、プローブポイントを変更したりする。
- 測定する:新しい挙動を捉える。仮説と比較する。
- 改善する:仮説が誤っている場合は、それを捨てて新しい仮説を立てる。
この反復ループにより、立ち往生するのを防ぎます。確認バイアスよりも客観的な観察を強いるのです。多くの場合、問題は論理にではなく、環境や測定ツールにあります。
📝 主な教訓の要約 📝
- タイミング図は法則ではなく、モデルである。現実を単純化しており、パラシティック効果を省略する可能性がある。
- 物理的効果は重要である。トレース長、インピーダンス、負荷容量は信号の挙動を変える。
- 測定の品質は極めて重要である。プローブは測定対象の回路を変化させる可能性がある。
- 静的タイミング解析は必須である。ハードウェアが製造される前に違反を予測する。
- 変数を隔離する。1つのことだけを変更して、根本原因を特定する。
- 電源インテグリティはタイミングの一部である。電圧ドロップはスイッチング速度に影響する。
- すべてを記録する。デバッグ中に得た知識は次のプロジェクトにとって貴重である。
タイミングの不一致を解消するには忍耐と技術的な厳密さが必要です。物理的な現実を修正する魔法のツールは存在しません。しかし、信号伝播の物理法則を理解し、厳密なデバッグプロセスを守ることで、設計をハードウェアの期待に合わせることができます。この整合性が最終製品の信頼性と性能を保証します。
信号整合性とタイミングクロージャーに関する理解をさらに深めていきましょう。システムがより高速かつ高密度化するにつれ、許容誤差の余地は狭まります。これらのトラブルシューティング技術を深く理解することで、現代の電子機器の複雑さに対しても設計の堅牢性を保つことができます。