タイミングが極めて重要なシステムを設計するには、厳密なアプローチが求められます。安全上重要な自動車制御ユニット、航空宇宙用電子機器、産業用自動化コントローラーの開発において、実行の予測可能性は絶対に欠かせません。時刻トリガー動作は、外部の中断があってもシステムの動作が正確な間隔で発生することを保証するために用いられる基本的なアーキテクチャパターンです。このガイドでは、タイミング図を用いたこの動作のモデル化手法について詳しく解説します。
理論的基盤、構築の実践的手順、信頼性を確保するために必要な厳密な検証について探求します。このガイドの最後まで読み進めると、抽象的な時間的要件を、堅牢なシステム設計を促進する具体的で視覚的な仕様に変換する方法を理解できるようになります。 🛠️
🔍 時刻トリガー型アーキテクチャの理解
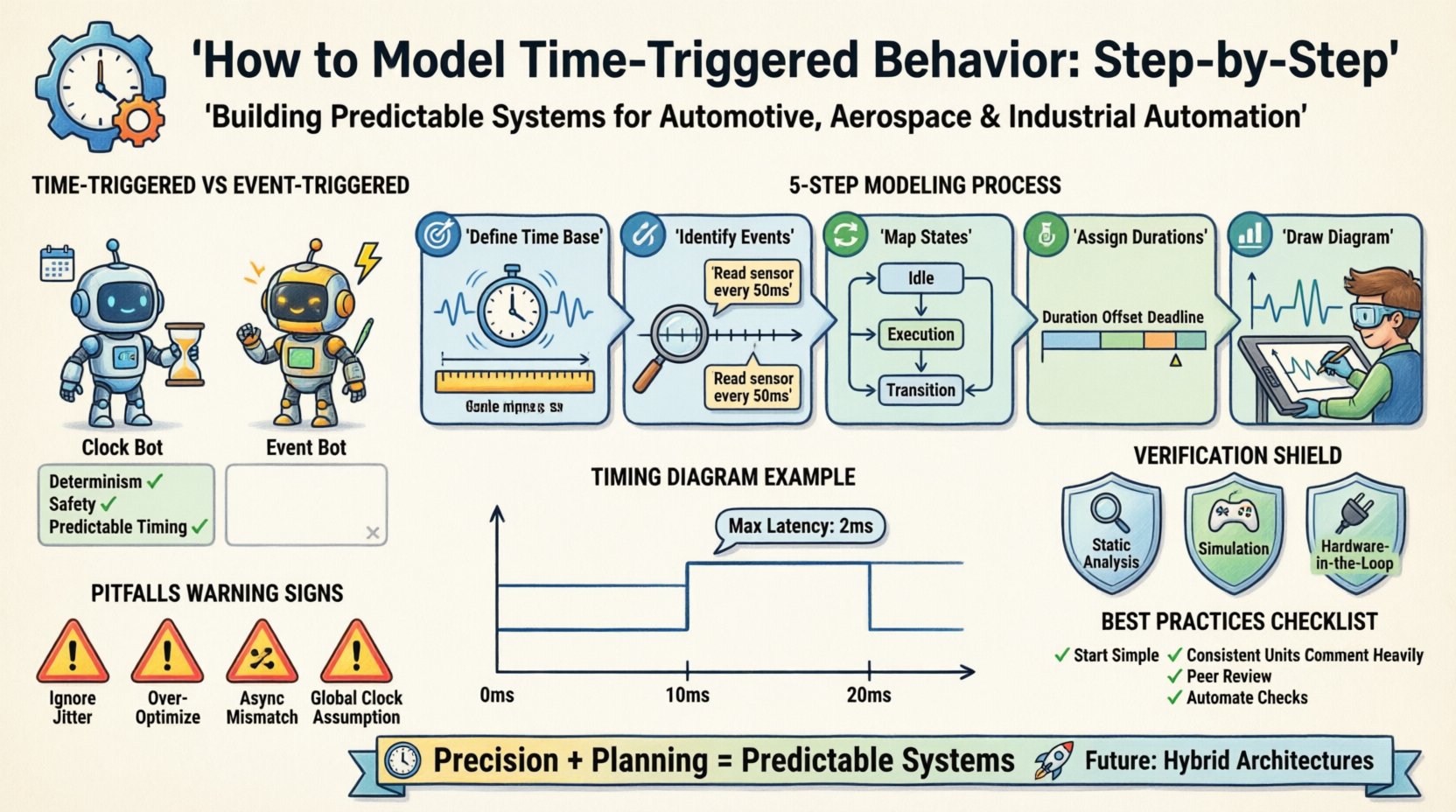
モデル化プロセスに取り組む前に、時刻トリガー型システムとイベントトリガー型システムの違いを理解することが不可欠です。イベントトリガー型システムでは、特定の刺激が発生した場合にのみコンポーネントが動作します。これは効率的ですが、高負荷下で予測不能な遅延が生じる可能性があります。一方、時刻トリガー型システムはグローバルまたはローカルな時計に基づいて動作します。動作は事前に定められた時刻にスケジューリングされます。
- 決定性: 主な利点です。タスクがいつ実行されるかを正確に把握できます。
- 安全性: 安全性が求められる文脈で、デッドラインが守られていることを証明しやすくなります。
- 複雑性: 分散ノード間での慎重な同期が必要です。
この動作をモデル化する際には、タイミング図に依存します。これらの視覚的ツールは、信号、状態、時間の関係をマッピングします。ソフトウェア開発者とハードウェアエンジニアの両方にとって、設計のブループリントとして機能します。 📊
📋 効果的なモデル化の前提条件
明確な基盤なしに図を描き始めるのは、しばしば誤りを招きます。適切な準備により、モデルがシステムの実際の物理的・論理的制約を正確に反映していることを保証できます。モデル化プロセスを開始する前に、特定の入力を収集する必要があります。
1. 要件仕様
すべてのタイミング制約は、要件から生じます。センサ読み取りの許容最大遅延は何か?制御ループの最小周波数は何か?これらの値は明確に文書化する必要があります。ここでの曖昧さは正確さの敵です。
2. ハードウェア制約
物理環境がモデルの限界を規定します。マイコンのクロック速度はどれくらいですか?通信バスにどれほどのジッターが存在しますか?これらのハードウェア上の現実を、タイミングマージンに反映させる必要があります。 🖥️
3. コンポーネント間の依存関係
システムはほとんどが孤立して存在しません。モーターコントローラーはブレーキシステムに依存し、ブレーキシステムはセンサアレイに依存しています。データフローと依存関係を理解することは、正しいイベントの順序をマッピングするために不可欠です。
⚙️ ステップバイステップのモデル化プロセス
時刻トリガー型モデルを構築することは、体系的な作業です。システムの動作を細かい時間単位に分解し、それらの単位に論理を割り当てる必要があります。正確性を確保するために、この構造化されたアプローチに従ってください。
ステップ1:時間基準の定義
あらゆるタイミング図の基盤は時間軸です。参照クロックを設定する必要があります。これはしばしば「システムチック」または「サイクルタイム」と呼ばれます。
- 分解能の選定:ミリ秒、マイクロ秒、またはクロックサイクルでモデル化しますか?重要な動作を捉えるために必要な最小単位を選択してください。
- 周期の設定:システムの基本周期を決定します。たとえば、制御ループが10ミリ秒ごとに実行される場合、ベース周期は10msまたはその約数に設定すべきです。
- 目盛りのマーク:視覚的または論理的に各サイクルの開始をマークします。これらが時刻トリガー動作が発火可能な瞬間です。
ステップ2:タイムトリガーイベントの特定
システム内のすべてのアクションがタイムトリガーされるわけではありません。時間によって発生するイベントと、状態の変化によって発生するイベントを区別する必要があります。特定の間隔で発生しなければならないアクションを明確に分離してください。
| イベントタイプ | トリガー条件 | 例 |
|---|---|---|
| タイムトリガー | 特定の時間/サイクル | センサーを50msごとに読み取る |
| イベントトリガー | 信号の変化 | 温度が100°Cを超えたときにアラートを発する |
| ハイブリッド | 時間+イベント | 時間が100msであり、かつバッファが満杯の場合にデータを送信する |
モデリングの努力を主にタイムトリガー列に集中させましょう。これらは設計における予測可能な基準点です。
ステップ3:状態遷移のマッピング
タイムベースが設定され、イベントが特定されたら、これらの間隔中にシステムが占める状態を定義しなければなりません。状態機械はしばしばその背後にある論理です。
- アイドル状態:次のトリガーを待っている間にシステムはどのような処理を行いますか?電力を消費しますか?入力をポーリングしますか?
- 実行状態:タイマーが発動したときに実行される具体的なアクションです。計算、通信、アクチュエーションを含みます。
- 遷移論理:状態間を移行するために必要な条件を定義します。時間は状態への進入をトリガーしますが、状態の退出は状態論理によって決定されます。
可能な限り状態遷移が排他的になるようにし、ラスコンディションを防ぎましょう。⚡
ステップ4:期間とオフセットの割り当て
いつ開始するかを知ることは、戦いの半分です。タスクが開始するタイミングは、戦いの半分です。また、そのタスクがどのくらい続くか、およびサイクルの開始からのオフセットも定義しなければなりません。どのくらい続くかサイクルの開始からのオフセットも定義しなければなりません。
- 所要時間: 実行時間を推定してください。安全余裕を確保するために、最悪実行時間(WCET)を含めてください。
- オフセット: タスクはサイクルの開始時(オフセット0)に即座に開始されるか、遅延があるか。たとえば、センサ読み取りは前のタスクの完了を許すために、10msサイクルの5ms目に開始されることがある。
- 締切: 出力はいつまでに準備されなければならないか?これがタスクウィンドウの終了を定義する。
ステップ5:タイミング図を描く
これは可視化の段階です。収集したデータを標準的な記法で表現してください。タイミング図では、通常、横軸に時間を、縦軸に信号または状態を配置します。
- 時間軸を描く: 区間を明確にラベル付けしてください(例:0ms、10ms、20ms)。
- 信号をプロットする: 高/低状態には水平線を、パルスには垂直なスパイクを描きます。
- 注記を追加する: 特定の制約(例:「最大遅延:2ms」)を示すために矢印やテキストを使用してください。
- サイクルを強調する: 時間基準の1周期を表すセグメントを視覚的にグループ化する。
📐 タイミング図の記法基準
他のエンジニアがモデルを理解できるようにするため、確立された記法規則に従ってください。具体的なスタイルは異なる場合がありますが、基本原則は一貫しています。
- 信号線: 水平線は信号の時間経過における状態を表します。垂直線は瞬時の遷移を表します。
- 高/低状態: ロジックレベル1と0が物理的に何を表すかを明確に定義してください(例:3.3V 対 0V)。
- 遅延: 入力と出力の間の遅延を示すために、括弧や特定の記号を使用してください。
- 並列性: 並行する活動を示すために、信号を重ねて描きます。2つのタスクが同時に実行される場合、その時間ブロックは水平に揃えるべきです。
明確さが最も重要です。同僚が5分以内に図を読み取れなければ、改善が必要です。👁️
🛡️ 検証と検証
設計が検証されるまで、モデリングは完了しません。このステップでは、理論モデルが意図された要件と一致し、現実世界の条件に耐えうるかを確認します。
1. 静的解析
モデルの論理的一貫性を確認してください。二つのタスクが衝突する時間窓は存在するか?スケジュールされたデータ転送に十分なバス帯域幅があるか?静的解析ツールは、これらの衝突を自動的に検出できることが多い。
2. シミュレーション
モデルの仮想実行を実行する。通常の動作とエッジケース(例:信号喪失、ネットワーク遅延)をシミュレートするテストケースを入力する。タイミング制約が違反されていないかを観察する。
- ストレステスト:システムの限界まで負荷をかける。クロックのジッターが増加した場合、何が起こるか?
- 境界テスト:定義した時間窓の正確な端でテストを行う。
3. ハードウェアインザループ(HIL)
可能な限り、モデルを実際のハードウェアに接続する。これにより、純粋なソフトウェアモデルが見逃す可能性のある現実世界の電気ノイズや処理遅延を捉えることができる。 🖧
⚠️ 時間同期モデル設計における一般的な落とし穴
経験豊富なエンジニアですら、時間同期システムを扱う際に特定の課題に直面することがある。これらの一般的な問題に気づいておくことで、大幅なデバッグ時間の節約が可能になる。
1. ジッターの無視
実際のクロックは完璧ではない。クロックはドリフトし、ジッターを生じる。完璧な10ms周期をモデル化した場合、クロックが1%変動するだけでシステムは失敗する。タイミングマージンには常にジッター用の余裕を設けるべきである。
2. 過剰最適化
すべてのタスクを可能な限り狭い時間枠に収めようとするのは、システムを脆弱にする。予期せぬイベントや優先度の高い割り込みに対応できる余裕時間(スラック時間)を確保するべきである。完璧に最適化されたシステムより、堅牢なシステムの方が優れている。 ⚖️
3. 異種同期の不整合
時間同期システムはしばしばイベント同期の周辺機器とインターフェースする。たとえば、キーボード入力はイベント同期であるが、システムは時間同期でその入力をポーリングする。ポーリングレートが遅すぎると入力が見逃され、速すぎるとリソースが無駄になる。
4. グローバルクロックの仮定
分散システムでは、すべてのノードが完全に同期されたクロックを共有していると仮定するのは危険である。ネットワーク遅延やクロックドリフトは、同期プロトコルを用いて考慮しなければならない。
🔄 メンテナンスと進化
タイミング図は一度限りの成果物ではない。要件が変化するにつれて、モデルも進化しなければならない。このセクションでは、プロジェクトのライフサイクルにわたって時間同期モデルの整合性を維持する方法を説明する。
バージョン管理
タイミング図をコードと同様に扱う。変更を追跡するためにバージョン管理システムを使用する。これにより、新しい変更によってタイミング違反が発生した場合、以前のバージョンに戻すことができる。
変更影響分析
時間制約を変更する前に、影響分析を行う。サイクル時間を10msから5msに変更すると、CPU負荷は2倍になり、他のタスクに利用可能な時間が半分になる。変更の波及効果を文書化する。
ドキュメントの更新
テキスト形式の要件を視覚的モデルと一致させる。図が変更されたら、要件文書を即座に更新しなければならない。テキストと図の不一致は、実装エラーを引き起こす。 📝
📊 モデリングアプローチの比較
ここでは時間同期モデルが焦点であるが、他のモデリングスタイルと簡単に比較することで、その特有の位置づけを理解するのに役立つ。
| アプローチ | 主な焦点 | 最も適している用途 |
|---|---|---|
| タイム・トリガー型 | 予測可能な遅延 | 安全に重要な制御ループ |
| イベント・トリガー型 | 応答性 | ユーザーインターフェース、バックグラウンドタスク |
| データフロー | スループット | 信号処理パイプライン |
タイム・トリガー型モデリングがこの分野の中でどのように位置づけられるかを理解することで、適切なツールと技術を選定するのに役立ちます。
🎯 成功のためのベストプラクティス
タイム・トリガー型の動作モデルが堅牢で保守可能であることを確実にするため、これらの確立されたベストプラクティスに従ってください。
- シンプルから始める:まずコアループをモデル化する。メインのタイミングが検証された後、複雑さや周辺タスクを追加する。
- 一貫した単位を使用する:プロジェクト全体でミリ秒またはマイクロ秒を一貫して使用する。単位を混在させると計算エラーが生じる。
- コメントを多めに書く:重要なタイミング決定ごとに注釈を付ける。なぜ5msのオフセットが選ばれたのかを、単に「選ばれた」ということではなく、説明する。なぜ5msのオフセットが選ばれた理由を、単に「選ばれた」ということではなく、それが選ばれたという理由を説明する。
- 定期的にレビューする:タイミング図に対して同僚レビューを行う。二度目の目が、期限を逃したタスクやレースコンディションを見逃すことが少ない。
- チェックを自動化する:可能な限り、スクリプトを使用してモデルに対してタイミング制約を検証する。これにより人的ミスを減らすことができる。
🔮 時間モデルの未来
組み込みシステムがより複雑化するにつれ、正確なタイミングモデルへの需要が高まっている。現代のシステムはしばしば、タイム・トリガー型とイベント・トリガー型のパラダイムをハイブリッドアーキテクチャで組み合わせる。これには、さらに洗練されたモデリング技術が求められる。
将来の進展には、高レベルのコードからタイミング図を自動生成する機能が含まれる可能性があり、手作業の負担が軽減されます。しかし、人間の監視と論理的検証の根本的な必要性は常に変わらないままです。時間に応じて動作する振る舞いの基本原理を理解するエンジニアは、引き続き不可欠です。🚀
📝 主なポイントの要約
時間に応じて動作する振る舞いをモデル化することは、システムの信頼性を確保するための重要なスキルです。明確な時間基準を設定し、特定のトリガーを特定し、状態をマッピングし、設計を厳密に検証することで、予測可能なシステム性能の基盤が築かれます。タイミングは速度だけではなく、順序と確実性であることを思い出してください。
覚えておくべきポイント:
- 正確な時間基準とサイクル期間を設定する。
- 時間に応じて動作する行動とイベントに応じて動作する行動を区別する。
- 明確さのために標準的なタイミング図の表記を使用する。
- ハードウェアのジッターと実行のばらつきを考慮する。
- システムのライフサイクル全体にわたりモデルを維持する。
規律と細部への注意をもって取り組めば、現代の技術が求める精度で動作するシステムを構築できます。信頼性への道は、正確なタイミングモデルで舗装されています。⏱️