組み込みシステムおよびインターネット・オブ・シングス(IoT)アーキテクチャの複雑な世界において、タイミングは単なる指標ではなく、システムの安定性を決定する根本的な制約である。複数のスレッドや割り込みが同時に共有リソースにアクセスしようとする場合、ラ race 条件が発生する可能性が生じる。本ガイドでは、タイミング図を用いてこのような同期問題を診断する方法について技術的に検討する。並行実行のメカニズムを検討し、信号遷移を分析し、論理が意図された動作から逸脱する正確な瞬間を特定する。
🧩 組み込みシステムにおける並行処理の理解
IoTデバイスはしばしば厳格な電力および処理制約の下で動作する。効率を最大化するために、開発者は頻繁に並行処理を実装する。これは、中央処理装置(CPU)がセンサーのポーリング、ネットワーク送信、アクチュエータ制御といった複数のタスクを、同時に処理しているように見えることを意味する。しかし、シングルコアのマイコンでは真の並列処理は稀である。代わりに、高速なコンテキストスイッチングが同時性の錯覚を生み出す。
- 共有メモリ:割り込みサービスルーチン(ISR)とメインループの両方からアクセス可能な変数。
- ハードウェア周辺機器:UART、SPI、またはI2C通信に使用されるレジスタ。
- ステートマシン:外部のトリガーに基づいて遷移する論理。
これらの要素が適切な同期プリミティブなしに相互作用すると、システムの状態は非決定的になる。プロセスの結果が、特定の順序で発生することが保証されていないイベントの相対的なタイミングに依存する場合、ラ race 条件が発生する。
📊 タイミング図のデバッグにおける役割 🛠️
タイミング図は、定義された時間軸上の信号の視覚的表現である。デバッグの文脈では、フォレンジックツールとして機能する。静的コードレビューとは異なり、タイミング図はハードウェアとソフトウェアの相互作用の動的挙動を捉える。エンジニアが遅延、ジッター、重複する実行ウィンドウを可視化できる。
タイミング図の主要な構成要素
| 構成要素 | 説明 | ラ race 条件への関連性 |
|---|---|---|
| 時間軸 | 時間(ns、μs、ms)を表す水平線 | イベントの順序を確立する |
| 信号線 | 特定のピンや変数を表す垂直線 | ハイ/ロウ状態またはデータの変化を示す |
| 遷移 | 信号状態が変化するエッジ(立ち上がり/立ち下がり) | 割り込みのトリガーポイントを示す |
| 遅延マーカー | トリガーと応答の間の遅延 | 処理のボトルネックを明らかにする |
🏭 ケーススタディのシナリオ:スマート電力メーター
電圧および電流パルスを測定することを目的としたIoTエネルギーメーターを検討する。このデバイスは、セルラーモジュールを介してクラウドゲートウェイに要約パケットを送信しながら、これらのパルスを非揮発性メモリに記録しなければならない。システムアーキテクチャは、メインアプリケーションループと電圧しきい値を越えたときに発生するハードウェア割り込みを含む。
システム仕様
- マイコン:32ビットARM Cortex-M4ベースのプロセッサ
- 共有リソース:RAM内の4バイトのカウンタ変数
- 割り込み発生源:外部電圧コンパレータ
- メインループのタスク:定期的なデータ集約と送信
想定される論理は単純である:電圧スパイクが発生すると、割り込みがカウンタをインクリメントする。メインループはカウンタを読み取り、その値を送信し、ゼロにリセットする。通常の負荷ではこれで動作するが、高負荷状態ではデータの破損が発生する。
📈 シグナルフローの分析
問題を診断するために、割り込みサービスルーチン(ISR)とメインループの相互作用に焦点を当てたタイミング図を構築する。この図は、CPUの実行フロー、共有カウンタの信号状態、および周辺機器のデータバスの状態を可視化する。
フェーズ1:リード・モディファイ・ライトサイクル
ラス条件の核心は、リード・モディファイ・ライト(RMW)シーケンスにある。この操作は多くのアーキテクチャにおいてアトミックではない。3つの異なるステップで構成される:
- リード:CPUがメモリから現在の値をフェッチする。
- モディファイ:CPUがレジスタ値に1を加算する。
- ライト:CPUが新しい値をメモリに書き戻す。
ステップ1とステップ3の間に割り込みが発生すると、データの整合性が損なわれる。このイベントのタイミング図による表現を検討しよう。
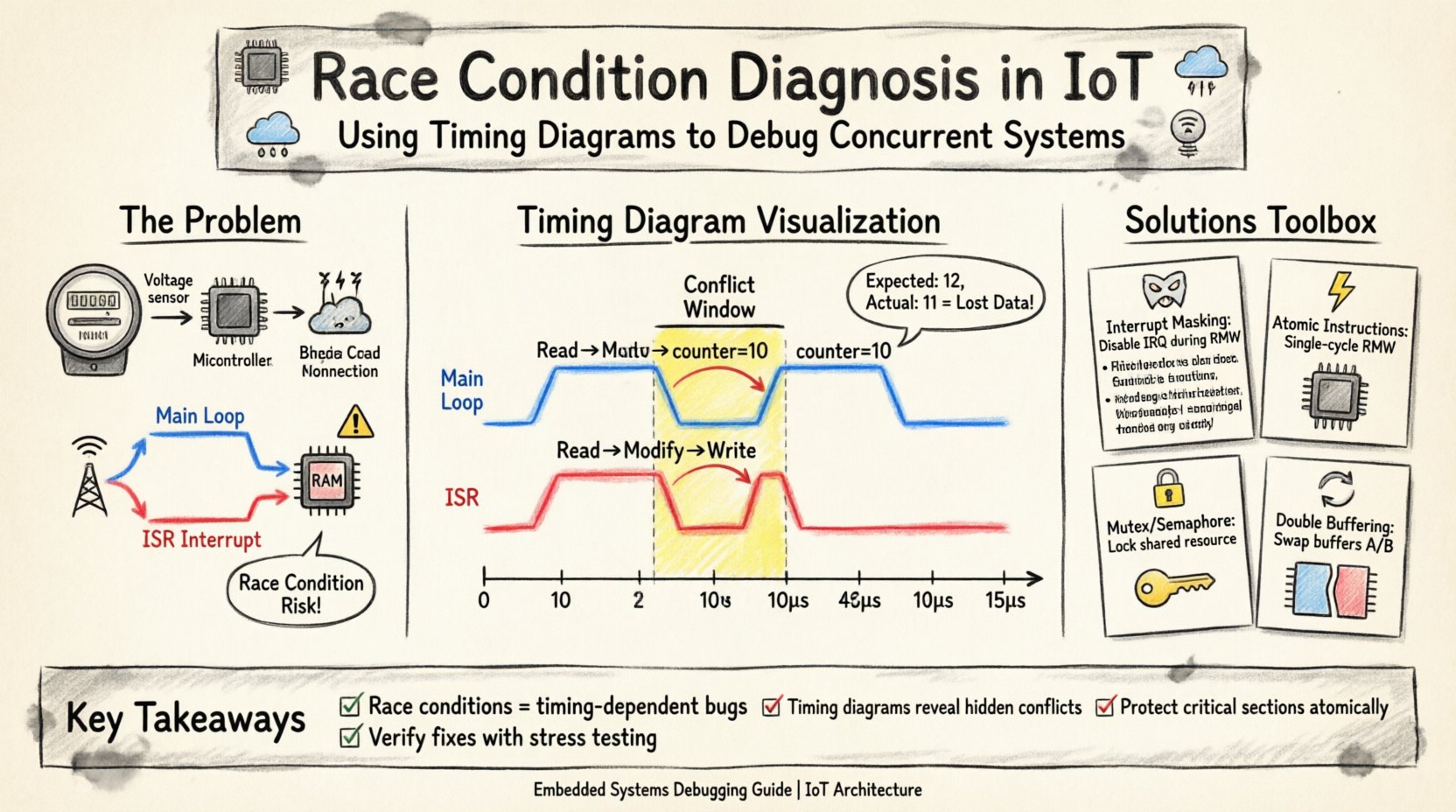
タイミング図の可視化
| 時間(μs) | メインループ | ISR | 共有カウンタ値 |
|---|---|---|---|
| 0 | カウンタをリード(値:10) | アイドル | 10 |
| 2 | レジスタには10が保持されています | 割り込みが発生しました | 10 |
| 5 | 変更 (10 + 1 = 11) | カウンタを読み取ります (値: 10) | 10 |
| 8 | 割り込み保留中 | 変更 (10 + 1 = 11) | 10 |
| 10 | 書き込み (11) | 書き込み (11) | 11 |
| 12 | カウンタをリセット (0) | 割り込みに戻る | 0 |
| 15 | サイクル終了 | メインループに戻る | 0 |
最終値の違いに注目してください。メインループとISRの両方が値を読み取りました10。両方とも1を加算し、結果として11。メインループは11を書き込みます。ISRがこれを11で上書きします。結果としてカウントは11になりますが、正しくは12であるべきです。ISRが検出したパルスは、メインループが前のカウントの処理中に途中であったため、実質的に失われてしまいました。
🔍 競合ウィンドウの特定
タイミング図により、競合ウィンドウが可視化されます。これはメインループが変数を読み込み、新しい値を書き込むまでの間隔です。この特定のアーキテクチャでは、サイクルに約8マイクロ秒かかります。競合状態が発生するためには、割り込み遅延がこのウィンドウより短くなければなりません。
ウィンドウに影響を与える要因
- クロック速度:高い周波数は、RMWサイクルの物理的時間短縮する。
- メモリ遅延:SRAMやフラッシュ内のウェイトステートは、読み取り/書き込み時間を延長する可能性がある。
- コンパイラ最適化:インライン展開やレジスタ割り当ては、命令のタイミングを変更する可能性がある。
- 割り込み優先度: 割り込み優先度がメインループ内のクリティカルセクションより低い場合、競合が隠蔽される可能性がある。
ロジックアナライザまたはオンチップパフォーマンスモニタを使用して実際のクロックサイクルを測定することで、エンジニアは正確な露出ウィンドウを計算できる。このデータは、単純なソフトウェア修正が可能かどうか、またはハードウェア介入が必要かどうかを判断するために不可欠である。
🛡️ 解決戦略
競合状態がタイミング解析により確認された後、特定のアーキテクチャ変更が必要となる。目的は、クリティカルセクション(RMW操作)がアトミックに実行されるか、中断から保護されることを保証することである。
1. 割り込みマスク
最も直接的なアプローチは、クリティカルセクション中に割り込みを無効化することである。これにより、メインループが共有変数を更新している間にISRがプリエンプトするのを確実に防ぐことができる。
- 実装: 読み込みの前に割り込み有効フラグをクリアし、書き込みの後に設定するためのアセンブリ命令を使用する。
- 長所:複雑なデータ構造を必要とせずにアトミック性を保証する。
- 短所:すべての他の周辺機器の割り込み遅延を増加させる。高優先度の割り込みが遅延する可能性があり、リアルタイム性能に影響を与える。
2. アトミック命令
現代のプロセッサはしばしばアトミック操作のハードウェアサポートを提供している。これらの命令は、読み取り・修正・書き込みのシーケンスを、単一の分割不能なマシンサイクルで実行する。
- 実装:アトミックな比較・交換(CAS)またはフェッチ・アンド・アド命令に対応するライブラリ関数やインライン関数を使用する。
- 長所:パフォーマンスオーバーヘッドが最小限;グローバル割り込みの無効化を必要としない。
- 短所:ハードウェア依存性がある;すべてのレガシーマイコンコントローラーで利用可能ではない。
3. ソフトウェアロック(ミューテックス/セマフォ)
通信バッファなど、より複雑な共有リソースの場合、ロックメカニズムが必要となる。これにより、一度に1つのスレッドまたはプロセスだけがリソースにアクセスできることが保証される。
- 実装:メモリ内のフラグで、リソースが使用中であることを示す。メインループはフラグを確認し、ISRはアクセスを試みる前にフラグを確認する。
- 長所:柔軟性がある;タスクの優先順位付けが可能。
- 短所:コンテキストスイッチのオーバーヘッドを導入し、適切に管理されない場合、デッドロックの可能性がある。
4. ダブルバッファリング
データ送信のシナリオでは、ダブルバッファリングにより、書き込みフェーズでの同期の必要性を排除できる。メインループはバッファAに書き込み、ISRはバッファBから読み込みを行う。
- 実装:2つの異なるメモリ領域を維持する。フルブロックが準備できたら、ポインタを交換する。
- 長所:送信中のデータ破損を防止する;生産と消費を分離する。
- 短所:メモリ使用量が2倍になる;ポインタの管理に注意が必要。
🔄 検証とテスト
修正を適用した後は、解決策の検証のためにタイミング図を再生成する必要がある。目的は、メインループとISRのクリティカルセクションの重複が解消されたことを確認することである。
テストプロトコル
- ストレステスト:割り込み頻度とメインループの負荷を最大化し、最悪の状態を引き起こす。
- ログ解析:カウンタ値を既知の基準値(例:外部パルスジェネレータ)と比較する。
- 信号キャプチャ:ストレステスト中にタイミング図を記録し、競合ウィンドウが存在しないことを確認する。
タイミング図が、ISRがメインループが変数にアクセスする前に完全に実行されている、または変数が遷移中にロックされていることを示している場合、ラスコンディションは解決されたものとみなされる。
📝 タイミング解析における一般的な落とし穴
タイミング図があっても、エンジニアがデータを誤解する可能性がある。いくつかの一般的な誤りが、偽陰性や偽陽性を引き起こすことがある。
- ジッターを無視する:ネットワーク遅延やクロックドリフトにより、信号エッジがわずかにずれることがある。静的な図では、この変動性を捉えられないことがある。
- 電力モードの見落とし: CPUは低消費電力のスリープ状態に入ることがあり、命令のタイミングや割り込みのウェイクアップ時間を変更する。
- コンパイラの差異: 異なる最適化レベル(-O0 と -O2)は命令の順序を再配置し、クリティカルセクションの正確なタイミングを変更する可能性がある。
- ハードウェア遅延: パーサルの遅延(例:ADC変換時間)はソフトウェアのタイミング図に反映されないことが多く、システム全体の状態に影響を与える。
🚀 診断に関する結論
ラス条件を診断するには、静的コード解析から動的信号観察へのシフトが必要である。タイミング図は、並行環境における時間と論理の相互作用を理解するための必要な文脈を提供する。メインループの実行フローを割り込みサービスルーチンと照合することで、データ破損が発生する正確な瞬間が可視化される。
効果的な解決策は、ハードウェアの能力と性能要件に基づいて適切な同期戦略を選択することにある。アトミック命令、割り込みマスク、あるいはアーキテクチャの再設計のいずれであれ、目標は一貫している:実行タイミングに関係なく共有状態が一貫性を保つことを確実にすること。
IoTデバイスがより複雑かつネットワーク化されるにつれ、誤差の許容範囲は狭まる。厳密なタイミング解析は単なるデバッグステップではない。信頼性の高い組み込みシステム開発ライフサイクルの重要な構成要素である。