埋め込みシステムとデジタル設計の複雑な世界において、論理の安定性は単なる好みではなく、必須である。ファームウェアはシリコンの背後にある知能であり、ハードウェアが外部刺激にどう反応するかを決定する。しかし、現代のマイコンやアプリケーション固有集積回路(ASIC)の複雑さは、追跡が難しい微細なバグを引き起こすことがよくある。こうした問題を緩和する最も強固なアプローチは、2つの基本的なツールであるタイミング図と有限状態機械(FSM)を厳密に適用することにある。これらは、予測可能で検証可能かつ保守可能なファームウェア設計のための厳密なフレームワークを形成する。
信号のタイミングと論理状態の関係を理解することは、順序論理に取り組むすべてのエンジニアにとって不可欠である。これらの2つの概念が一致しているとき、結果として得られるファームウェアは、温度変化、電圧の揺らぎ、クロック速度の変化に対して一貫した動作を示す。このガイドでは、これらのツールを活用して、推測や試行錯誤によるデバッグに頼ることなく、信頼性の高いファームウェア論理を構築する方法を解説する。
📈 基盤:タイミング図の理解
タイミング図は、信号が時間とともにどのように変化するかを図式化したものです。これは、ハードウェア部品とファームウェアルーチンの間の時間的関係を伝えるために使用される主要な言語です。ファームウェア論理の文脈において、これらの図はハードウェア環境とその上で実行されるコードとの間の契約の役割を果たします。
タイミング図の主要な要素
- 時間軸:クロックサイクルまたは絶対時間の進行を表す。システムが動作するリズムを定義する。
- 信号線:特定の入力、出力、または内部フラグを表す水平線。各線は1ビットまたは複数ビットに対応する。
- エッジ:立ち上がりエッジ(低から高)または立ち下がりエッジ(高から低)を示す垂直の遷移。これらはしばしば状態変化を引き起こす。
- 高/低状態:遷移の間に維持される論理レベルであり、任意の時点でデータの値を定義する。
- 遅延:セットアップ時間、ホールド時間、または伝播遅延など、イベントの間のギャップであり、安定性に必要な最小時間制約を示す。
ファームウェアを設計する際、タイミング図は「データが有効なのはいつか?」と「システムはいつ反応すべきか?」という問いに答える。この視覚的文脈がなければ、論理設計は推測のゲームになってしまう。例えば、センサ信号が安定する前、すなわち早すぎると、ファームウェアはゴミデータを読み取ってしまう。逆に、遅すぎると、パルスを完全に見逃す可能性がある。
なぜタイミング図がファームウェアにおいて重要なのか
- ハードウェア制約の明確化:周辺デバイスが要求するセットアップ時間とホールド時間を明示的に示す。
- デバッグの参照:システムが故障したとき、タイミング図は期待される動作と実際の動作の基準を提供する。
- コミュニケーション:ハードウェアチームとソフトウェアチームがインターフェースプロトコルについて合意するためのユニバーサルな文書として機能する。
- 最適化:ソフトウェアがハードウェア信号を無駄に待つようなボトルネックを特定するのを助ける。
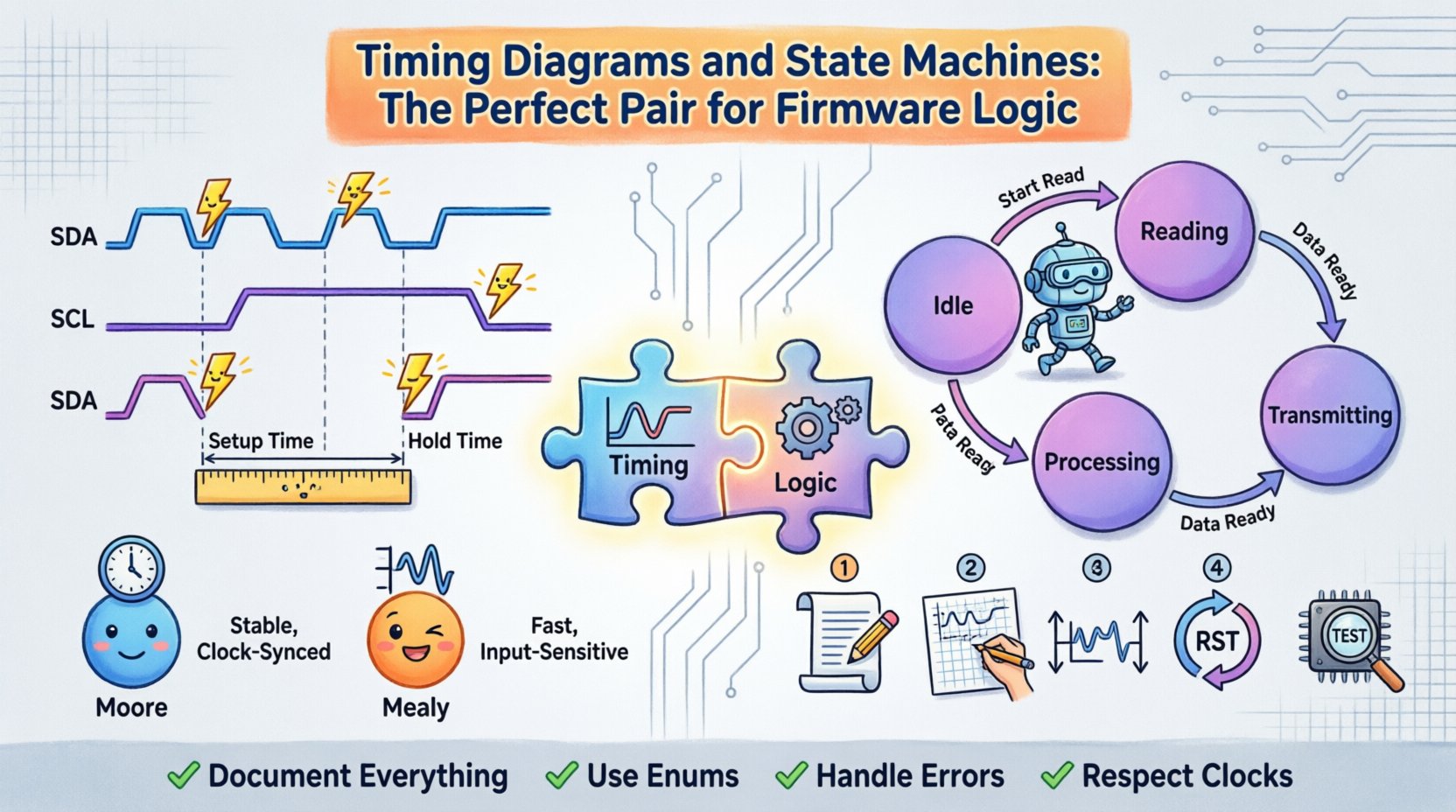
I2C通信インターフェースを想定する。ファームウェアはデータを読み取る前にクロック線が安定するのを待たなければならない。タイミング図はSDA線とSCL線を視覚的にマッピングし、スタートコンディション、アドレスバイト、データバイトが正確にどこに発生するかを示す。この可視化により、マスタがまだクロックを駆動している間にソフトウェアがデータバスを読み取ろうとする競合状態を防ぐことができる。
🔄 論理エンジン:有限状態機械(FSM)
タイミング図が環境を定義する一方で、有限状態機械(FSM)は動作を定義する。FSMは、コンピュータプログラムと順序論理回路の両方を設計するために使用される計算モデルである。有限個の状態、それらの状態間の遷移、およびアクションから構成される。
状態機械の構成要素
- 状態:特定の瞬間におけるシステムのスナップショット。現在の動作モード(例:アイドル、読み取り、処理、送信)を表す。
- 遷移:特定の条件または入力に基づいて、一つの状態から別の状態への移動。
- 入力:状態変更をトリガーする外部信号または内部フラグ。
- 出力:特定の状態にいる間(Moore)または遷移中に(Mealy)生成される動作または信号。
Moore機械とMealy機械
適切な状態機械の種類を選択することは、重要な設計意思決定である。選択の結果、タイミングの感度と出力の安定性に影響を与える。
| 特徴 | Moore機械 | Mealy機械 |
|---|---|---|
| 出力の依存関係 | 現在の状態にのみ依存 | 現在の状態と入力に依存 |
| タイミングの安定性 | より安定;出力はクロックエッジでのみ変化 | より高速な応答;出力は入力に即座に変化可能 |
| 複雑さ | 特定の入力組み合わせを処理するために、より多くの状態を必要とする可能性がある | 同じ機能に対して、しばしばより少ない状態で済む |
| ギャリッチ感度 | 入力ギャリッチに対して敏感でない | 入力ギャリッチに対してより敏感 |
信号の整合性が極めて重要なファームウェア論理では、Moore機械がしばしば好まれる。出力が状態に厳密に紐づけられており、通常クロックエッジに同期されるため、非同期なギャリッチがシステム内を伝播するリスクを低減できる。Mealy機械は高速性を提供するが、入力が準安定状態を引き起こさないよう、慎重なタイミング解析が必要となる。
🤝 時間と論理の同期
この組み合わせの真の力は、タイミング図と状態機械の遷移論理を同期させることにある。状態機械のすべての遷移は、タイミング図上の有効なポイントに対応しなければならない。ハードウェア信号がクロックサイクルと衝突するタイミングで変化すると、ファームウェアは定義されていない状態に入ってしまう可能性がある。
クロックドメインの確立
すべての状態遷移は、理想的には特定のクロックエッジ(通常は立ち上がりエッジ)で発生するべきである。タイミング図は、すべての入力信号がクロックエッジの前のセットアップ時間中に安定しており、クロックエッジの後のホールド時間中に安定したまま維持されることを示す必要がある。これらの時間窓を無視するファームウェア論理は、誤ったデータをサンプリングするリスクを抱える。
この整合性を確保するために:
- 入力をクロックサイクルにマッピングする:入力がどのクロックサイクルでサンプリングされるかを明確に定義する。サイクル内での入力の任意のサンプリングは行わない。
- 入力のノイズ除去(デバウンス):機械式スイッチやノイズの多いセンサーは安定するまでに時間がかかる。タイミング図にはデバウンス期間を含め、状態機械にはこの期間を処理する専用の「待機」状態を設けるべきである。
- 非同期イベントの組み合わせを避ける:割り込みが発生した場合、状態機械の論理に入るためにシステムクロックに同期させる必要がある。
非同期入力の処理
すべての信号がシステムクロックと同期しているわけではない。外部割り込み、センサーのトリガー、またはユーザー入力は、ランダムなタイミングで到着する可能性がある。これらの信号がクロック付きの状態機械と相互作用する場合、タイミング図が安全網となる。
標準的な手法は、複数段の同期回路を用いるものである。タイミング図は、信号が2つ以上のフリップフロップを通過し、状態機械が読み取る前に安定する様子を示すべきである。これにより、信号が論理的0でも1でもない状態(メタスタビリティ)を防ぎ、システムの停止やクラッシュを回避できる。
🛠️ 実装ワークフロー
このペアリング手法を用いたファームウェア開発には、構造的なワークフローが必要である。ステップを飛ばすと、保守が困難な脆弱なコードが生まれる。以下のステップは、タイミング図と状態機械を統合するためのプロフェッショナルな手法を示している。
1. プロトコルと制約を定義する
コードを1行も書く前に、タイミング要件を文書化する。理想的な動作を表すタイミング図を作成する。最小パルス幅、最大応答時間、アイドル状態を含める。この文書はファームウェア論理の唯一の真実の基準となる。
2. 状態機械のトポロジーを設計する
状態図をスケッチする。すべての可能な状態と、それらの間を遷移させるために必要な条件を特定する。すべての状態に明確な終了条件があることを確認する。システムが無限に停止してしまう「孤児状態」を避ける。
3. ロジックをタイミングにマッピングする
状態遷移をタイミング図で定義されたクロックエッジに合わせる。たとえば、状態機械が10ミリ秒の遅延を待つ必要がある場合、現在のシステム周波数に基づいてそれが何個のクロックサイクルに相当するかを計算する。プロセッサをブロックするソフトウェアの遅延ループではなく、状態内にカウンタとして実装する。
4. リセットロジックを実装する
信頼性の高いファームウェアはリセット時に既知の状態に戻らなければならない。タイミング図にはリセット信号の持続時間も示すべきである。状態機械の初期化コードは、電源投入の順序に関わらず、定義された「アイドル」または「準備完了」状態からシステムが開始されることを保証しなければならない。
5. 検証とシミュレーション
タイミング図に基づいてロジックをシミュレーションする。ソフトウェアが信号が有効であると仮定しているが、実際には有効でない状態を検証する。ハードウェアが応答できるよりも速く状態が変化するラス条件を確認する。一般的なシミュレーション環境を用いてハードウェア動作をモデル化し、ファームウェア論理がタイミング制約を満たしているかを検証する。
🔍 デバッグと検証
慎重な計画をしても、問題は発生する。ファームウェア論理が失敗した場合、タイミング図と状態機械の組み合わせは強力なデバッグ戦略を提供する。ランダムなログ出力ではなく、これらのツールを用いて障害発生点を特定する。
一般的なタイミング違反
- セットアップ時間違反:データ入力がクロックエッジに近すぎることで変化した。ファームウェアは不安定なデータを読み取る。解決策:状態機械内のサンプリングポイントを後続のサイクルにずらす。
- ホールド時間違反:データ入力がクロックエッジの直後に早すぎることで変化した。フリップフロップは前の状態を失う。解決策:ハードウェアパスにバッファまたは遅延を追加する。
- メタスタビリティ: シグナルが解決されていません。システムは不安定に動作する可能性があります。解決策:適切な2段階同期回路を実装する。
状態機械のエラー
- 到達不可能な状態:進入または退出ができない状態。これは通常、遷移条件に論理エラーがあることを示している。
- 誤った遷移:ノイズの影響で、システムがべきでない状態に入ってしまう。解決策:入力検証またはノイズ除去状態を追加する。
- 無限ループ:システムが一つの状態に永久に留まる。解決策:すべての状態にタイムアウトまたは退出条件があることを確認する。
図を用いた根本原因分析
バグが発生した際は、実際の信号トレースを理想的なタイミング図の上に重ねて表示する。ずれがないか確認する。入力信号が遅れて到着したか?クロックにジッターはなかったか?状態機械が過剰に早期に遷移したか?この視覚的な比較により、原始的なコードログを読むよりも検索範囲を大幅に絞り込める。
📊 ロバストな論理設計のためのベストプラクティス
プロジェクトのライフサイクルにわたり高い品質と信頼性を維持するため、これらのベストプラクティスを遵守する。これらのガイドラインは技術的負債の発生を防ぎ、ファームウェアが柔軟に適応できるようにする。
- すべてをドキュメント化する:コードと並行してタイミング図および状態図を常に最新の状態に保つ。古くなったドキュメントは、ドキュメントがないよりも悪い。
- 状態を単純に保つ:分岐が多すぎる複雑な状態機械を避ける。機械の状態数が10以上の場合、サブマシンに分割することを検討する。
- 明示的な列挙型を使用する:状態名を定数または列挙型として定義する。「if (state == 3)」のようなマジックナンバーを使用しない。代わりに「if (state == STATE_IDLE)」を使用する。
- エラーを適切に処理する:「エラー」状態を含める。システムが無効な状態を検出したら、未定義の論理を継続するのではなく、この状態に遷移し、停止またはリセットする。
- クロックドメインを尊重する:システムが複数のクロック周波数を使用する場合、適切なクロックドメインクロス技術を実装する。非同期なクロック間でデータを直接移動してはならない。
- ブロッキング遅延を最小限に抑える:時間を待つために「while」ループを使用してはならない。カウンタを使用して状態機械で時間を管理し、プロセッサが他のタスクを処理できるようにする。
🔗 実際の応用例
シンプルなバッテリ管理システムを検討する。ファームウェアは電圧を監視し、充電電流を制御し、ホストコンピュータにステータスを通信する。
状態1:アイドル。システムは充電リクエスト信号を待機している。タイミング図によると、この信号は少なくとも5ミリ秒間ハイでなければならない。
状態2:充電中。有効なリクエストを受けた後、システムは充電状態に入る。タイマーステートが、電流が特定の期間流れるように保証する。電圧が限界を超えた場合、システムは「状態3:過電圧保護.
状態3:保護。 充電回路は無効化されています。システムは、電圧が安全なしきい値を下回るまで待機し、その後アイドル状態に戻ります。タイミング図により、保護ハードウェアが負荷を物理的に切断した後だけ、電圧センサーがサンプリングされることが保証されます。
状態機械がなければ、コードが電圧を連続ループでチェックする可能性があります。電圧が一時的に上昇した場合、ループが速く反応し、振動を引き起こすかもしれません。状態機械を用いることで、保護状態への遷移には時間とともに安定した状態が必要となり、誤動作を防ぎます。
🚀 前進する
タイミング図と状態機械の統合は単なる設計選択ではなく、機能的なコードと本番用ファームウェアを分けるための厳格なプロセスです。時間的制約を視覚的に定義し、論理フローを構造的に定義することで、エンジニアはノイズやハードウェアのばらつき、運用ストレスに対して耐性を持つシステムを構築します。
このアプローチには初期段階での努力が必要です。コードの記述を始める前に、図を描き、状態を計画する時間が必要です。しかし、現場でラス条件をデバッグするコストは、初期段階で正しく設計するコストをはるかに上回ります。システムがより複雑になるにつれて、この構造化されたアプローチの必要性は高まります。信頼性への道は shortcuts がありません。前進するためには、継続的なドキュメント化、厳密な検証、そして物理世界の時間的制約への敬意が不可欠です。
これらの実践を採用することで、ファームウェアの論理が透明でテスト可能であることが保証されます。チームは、タイミング図が状態機械が動作する現実を定義していることを理解することで、効果的に協働できます。ハードウェアが高価で、市場投入までの時間が極めて重要な業界において、この組み合わせが成功の最良のチャンスを提供します。
✅ 主なポイント
- タイミング図は、信号の時間的挙動に関する視覚的な契約を提供します。
- 状態機械は、システムの挙動に対する構造化された論理を提供します。
- 同期は、これらのツール間を結ぶ重要な接点です。
- ほとんどの組み込みタスクにおいて、ムーア機械はメーリー機械よりも優れたタイミング安定性を提供します。
- 実際のトレースを理想的なタイミング図と比較することで、デバッグは最も効果的になります。
- ドキュメントは、コードと共に進化しなければ、有用性を保てません。
これらの原則に従うことで、ファームウェアエンジニアは、時間の経過にも耐えうる論理を構築でき、ますます複雑化するデジタル環境における安定性を確保できます。