Comprendre le flux des données est essentiel lors du travail avec l’électronique numérique et les microcontrôleurs. Un diagramme de temporisation sert de plan directeur pour ce flux, illustrant comment les signaux évoluent au fil du temps. Pour les ingénieurs embarqués, ces diagrammes ne sont pas seulement des illustrations ; ils constituent le langage utilisé pour définir le comportement du matériel, vérifier les protocoles de communication et diagnostiquer les pannes système.
Ce guide offre une exploration approfondie des diagrammes de temporisation. Nous aborderons la théorie fondamentale, les paramètres essentiels, les protocoles de communication courants et les applications pratiques en débogage. Que vous conceviez un nouveau circuit ou que vous analysiez un dispositif défaillant, maîtriser cet outil visuel est essentiel pour réussir sur le plan technique.
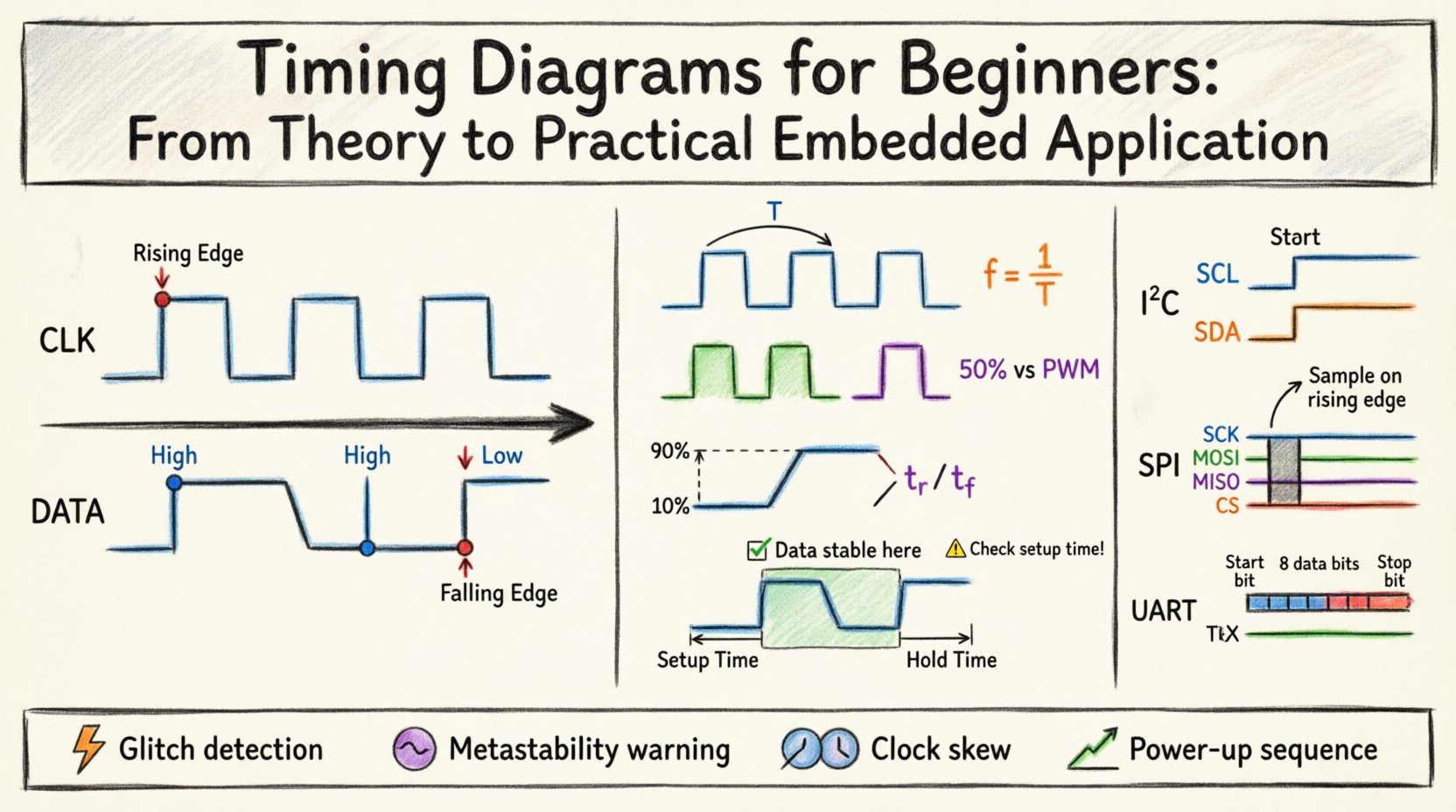
📐 Qu’est-ce qu’un diagramme de temporisation ?
Un diagramme de temporisation est une représentation graphique d’un signal ou de plusieurs signaux au fil du temps. Il cartographie les relations entre différents signaux électriques au sein d’un système. Contrairement à un schéma logique, qui montre les connexions, un diagramme de temporisation montrequandles événements ont lieu.
Les caractéristiques clés incluent :
- Axe du temps :L’axe horizontal représente le temps, allant de gauche à droite. Il peut être linéaire ou non linéaire selon l’objectif de l’analyse.
- Lignes de signal :Les lignes verticales représentent des signaux individuels (par exemple, Horloge, Données, Autorisation). Elles sont empilées verticalement pour montrer leurs relations.
- Niveaux logiques :Les signaux basculent généralement entre Haut (Logique 1 / VCC) et Bas (Logique 0 / GND).
- Transitions :Le passage d’un niveau à un autre est représenté par des fronts (montants ou descendants).
Dans les systèmes embarqués, les diagrammes de temporisation garantissent que les données sont échantillonnées au moment précis où elles sont stables. Sans cette synchronisation, la corruption des données survient immédiatement.
🔑 Concepts fondamentaux et paramètres
Pour lire efficacement ces diagrammes, vous devez comprendre les métriques spécifiques qui définissent l’intégrité du signal. Ces paramètres déterminent si un circuit numérique fonctionne correctement ou échoue en raison de violations de temporisation.
1. Période et fréquence
La période est le temps nécessaire pour qu’un cycle complet d’un signal se répète. La fréquence est l’inverse de la période.
- Période (T) :Mesurée en secondes (ou en nanosecondes, microsecondes).
- Fréquence (f) :Mesurée en Hertz (Hz). Formule :
f = 1 / T.
Dans un signal d’horloge, la période détermine la vitesse à laquelle le processeur ou la périphérie fonctionne. Une période plus courte signifie une vitesse d’horloge plus élevée.
2. Cycle de fonctionnement
Le cycle de fonctionnement représente le pourcentage d’une période pendant lequel le signal est actif (Haut).
- Cycle de travail de 50 % : Le signal est à niveau haut pendant la moitié de la période et à niveau bas pendant l’autre moitié. C’est courant dans les signaux carrés standards.
- Cycle de travail différent de 50 % : Utilisé dans des applications de contrôle spécifiques, telles que la modulation de largeur d’impulsion (PWM), où la largeur de l’impulsion varie pour contrôler la puissance ou la vitesse.
3. Temps de montée et temps de descente
Les signaux ne basculent pas instantanément. Un temps fini est nécessaire pour que la tension passe d’un niveau logique à un autre.
- Temps de montée : Le temps nécessaire pour passer du niveau bas (10 %) au niveau haut (90 %).
- Temps de descente : Le temps nécessaire pour passer du niveau haut (90 %) au niveau bas (10 %).
Des temps de montée et de descente rapides sont essentiels pour la communication à haute vitesse. Des transitions lentes peuvent entraîner une dégradation du signal, une sensibilité au bruit et des erreurs de temporisation.
4. Temps de préparation et temps de maintien
Ce sont les paramètres les plus critiques pour les circuits numériques synchrones, en particulier lorsque les données sont capturées par une frontière d’horloge.
| Paramètre | Définition | Pourquoi cela importe |
|---|---|---|
| Temps de préparation (tsu) | Le temps minimal pendant lequel les données doivent rester stablesavantl’arrivée de l’arête d’horloge. | Assure que la bascule d’entrée dispose de suffisamment de temps pour reconnaître le niveau logique. |
| Temps de maintien (th) | Le temps minimal pendant lequel les données doivent rester stablesaprèsl’arrivée de l’arête d’horloge. | Empêche les données de changer pendant que la bascule est encore en cours de fermeture. |
Si les données changent pendant la fenêtre de configuration ou de maintien, le système peut entrer dans un état métastable. Cela entraîne un comportement imprévisible, où le signal oscille entre Haut et Bas pendant une durée indéfinie.
📡 Protocoles de communication et temporisation
Les différents protocoles ont des exigences de temporisation uniques. Comprendre le schéma spécifique pour chaque interface est essentiel pour la conception matérielle et le développement de pilotes.
1. I2C (Inter-Intégré Circuit)
L’I2C est une interface à deux fils (SCL et SDA) utilisée pour la communication à courte distance entre circuits intégrés.
- SCL (Horloge série) : Alimenté par le maître. Contrôle la vitesse du transfert de données.
- SDA (Données série) : Bidirectionnel. Les données doivent changer uniquement lorsque SCL est bas.
- Condition de départ : SDA passe de Haut à Bas alors que SCL est Haut.
- Condition d’arrêt : SDA passe de Bas à Haut alors que SCL est Haut.
Dans l’I2C, le diagramme de temporisation montre le stretch d’horloge. Si un périphérique esclave est lent, il peut tirer la ligne SCL vers le bas pour retarder le maître jusqu’à ce qu’il soit prêt.
2. SPI (Interface périphérique série)
Le SPI est un protocole synchrone plus rapide, généralement utilisé pour la mémoire flash, les capteurs et les affichages.
- SCK (Horloge série) : Générée par le maître.
- MOSI (Maître sort Slave entrée) : Données du maître vers l’esclave.
- MISO (Maître entrée Slave sortie) : Données de l’esclave vers le maître.
- SS/CS (Sélection esclave) : Signal actif bas pour activer un périphérique spécifique.
La temporisation du SPI dépend fortement de la polarité de l’horloge (CPOL) et de la phase de l’horloge (CPHA). Le schéma change selon que les données sont échantillonnées sur le front montant ou descendant de l’horloge.
3. UART (Récepteur-émetteur asynchrone universel)
L’UART n’utilise pas de ligne d’horloge. Il s’appuie au contraire sur des débits prédéfinis (vitesse) convenus par les deux appareils.
- Lignes TX/RX : Lignes séparées pour l’émission et la réception.
- Bit de départ : Un signal bas indiquant le début d’une trame.
- Bits de données : 5 à 8 bits de données réelles.
- Bit d’arrêt : Un signal haut indiquant la fin de la trame.
Les diagrammes temporels pour UART montrent la période du bit. Si le débit est de 115200, chaque bit dure approximativement 8,68 microsecondes. Les écarts de précision horaire entre les dispositifs entraînent des erreurs de trame.
🔍 Lecture et analyse des diagrammes temporels
Lorsque vous ouvrez une fiche technique ou une trace d’analyseur logique, vous recherchez des motifs spécifiques. Voici comment aborder l’analyse de manière systématique.
1. Identifier la source d’horloge
Localisez le signal régulier et périodique. C’est votre référence. Tous les autres signaux doivent être analysés par rapport à cette transition d’horloge. Dans les systèmes asynchrones, cherchez plutôt le bit de départ ou les signaux d’échange.
2. Vérifier les fenêtres de validité des signaux
Examinez les lignes de données. Sont-elles stables au moment où l’horloge les échantillonne ? Si une ligne de données bascule exactement au moment où l’arête d’horloge arrive, le récepteur peut lire une valeur erronée. Cela apparaît souvent comme un « glitch » au milieu d’une période de données.
3. Mesurer le délai de propagation
Les signaux mettent du temps à voyager d’une puce à une autre. Si l’horloge est très rapide, ce délai pourrait dépasser la période d’horloge. Les diagrammes temporels aident à visualiser ce décalage. Si les données arrivent en retard en raison de la longueur des fils, le temps de préparation pourrait être violé.
4. Rechercher les échanges de signaux
De nombreux protocoles utilisent des lignes supplémentaires pour le contrôle de flux (par exemple, Occupé, ACK, NACK). Un diagramme temporel montre quand le maître attend une réponse de l’esclave. Si le timing ne correspond pas à la spécification du protocole, la communication échoue.
🛠️ Débogage et dépannage pratiques
Les diagrammes temporels sont l’outil principal pour le débogage des problèmes matériels. Lorsqu’un système ne parvient pas à s’initialiser ou que les données sont corrompues, le diagramme raconte l’histoire.
1. Identification des glitches
Un glitch est une impulsion brève qui survient de manière inattendue. Il peut être causé par du bruit électrique ou des conditions de course dans les portes logiques. Dans un diagramme temporel, il apparaît comme un pic qui dure quelques nanosecondes. Si une bascule capte ce pic, elle déclenche un changement d’état indésirable.
2. Détection de la métastabilité
La métastabilité se produit lorsque des signaux asynchrones sont échantillonnés par une horloge synchrone. La tension de sortie flotte dans une région indéfinie entre Haut et Bas. Sur une trace d’oscilloscope, cela ressemble à une transition lente qui dure plus longtemps que le temps de montée spécifié.
3. Analyse du décalage d’horloge
Le décalage survient lorsque les signaux d’horloge atteignent différentes parties du circuit à des moments différents. Si l’horloge arrive à la source des données avant la destination, les données pourraient changer avant d’être capturées. Les diagrammes temporels permettent de mesurer la différence entre les temps d’arrivée des arêtes d’horloge.
4. Vérification des séquences de mise sous tension
Les microcontrôleurs exigent souvent que les alimentations se stabilisent dans un ordre spécifique. Un diagramme temporel peut montrer la montée en tension de VCC et de la ligne de réinitialisation. Si la réinitialisation est libérée trop tôt, le processeur pourrait exécuter du code aléatoire.
⚠️ Erreurs courantes dans l’analyse temporelle
Même les ingénieurs expérimentés peuvent négliger des détails. Voici les pièges courants à éviter.
- Ignorer les niveaux de tension : Un signal peut être logiquement « haut », mais si la tension est trop faible (par exemple, 2,5 V dans un système 3,3 V), il ne peut pas être enregistré comme un 1 valide. Vérifiez toujours les seuils de tension (VIL, VIH).
- Supposer un commutage instantané : Les signaux du monde réel ont des temps de montée et de descente. Les conceptions à haute vitesse doivent tenir compte des limites physiques du silicium.
- Ne pas tenir compte des effets de charge : Connecter trop d’appareils à un bus augmente la capacité. Cela ralentit les temps de montée et de descente, pouvant potentiellement violer les contraintes de temporisation.
- Ne pas tenir compte de la température : Les performances du circuit varient avec la température. Les marges de temporisation fonctionnant à température ambiante peuvent échouer en cas de chaleur extrême ou de froid intense.
📝 Créer vos propres diagrammes de temporisation
La documentation est essentielle pour la collaboration d’équipe. Lors de la création de diagrammes pour vos propres conceptions, suivez ces bonnes pratiques.
- Utiliser des symboles standards : Restez fidèle aux formes standard de l’industrie pour les bords et les niveaux afin d’assurer une clarté maximale.
- Indiquer clairement les échelles de temps : Indiquez si l’échelle est linéaire. Si vous zoomez sur un événement spécifique, utilisez une vue en surimpression « agrandie ».
- Inclure des annotations : Ajoutez des notes expliquant les événements critiques, tels que « Réinitialisation active » ou « Fenêtre de données valide ».
- Préciser les conditions : Indiquez les conditions d’exploitation (tension, température) auxquelles la temporisation s’applique.
| Protocole | Vitesse | Fils | Cas d’utilisation typique |
|---|---|---|---|
| I2C | Faible à moyenne | 2 | Configuration, capteurs, EEPROM |
| SPI | Élevé | 4 | Mémoire Flash, affichages, convertisseurs ADC |
| UART | Faible à moyen | 2 | Console de débogage, GPS, Bluetooth |
| USB | Très élevé | 4 | Périphériques, stockage, alimentation |
🚀 Conclusion sur l’intégrité du temps
Les diagrammes de temporisation sont bien plus que des dessins ; ils constituent la vérification de l’intégrité du signal dans les systèmes embarqués. En comprenant la relation entre le temps et la tension, les ingénieurs peuvent concevoir des matériels robustes qui fonctionnent de manière fiable dans des conditions réelles.
Concentrez-vous sur les paramètres les plus importants : les temps de préparation et de maintien, les caractéristiques de montée/descente, et la synchronisation de l’horloge. Lorsqu’une erreur survient, suivez les signaux. Cherchez le moment où le temporisation échoue. Cette approche systématique conduit à un débogage plus rapide et à une fiabilité accrue du produit.
Mettez à jour vos diagrammes chaque fois que vous modifiez les conceptions. Une spécification de temporisation bien documentée épargne des centaines d’heures de dépannage à l’avenir. Utilisez ces outils visuels pour combler le fossé entre la logique théorique et la réalité physique.