Les systèmes embarqués fonctionnent dans un monde régulé par des cycles, des fronts et des intervalles précis. Contrairement aux systèmes informatiques généraux, où les performances sont souvent mesurées en débit, les environnements embarqués privilégient la prévisibilité. Une simple nanoseconde de retard peut entraîner une panne du système, une corruption des données ou des dommages matériels. Au cœur de la compréhension et de la gestion de ces contraintes se trouve le diagramme de timing.
Un diagramme de timing n’est pas simplement un dessin ; c’est un contrat entre le matériel et le logiciel. Il visualise l’interaction des signaux au fil du temps, en définissant les fenêtres acceptables pour la transmission des données, les transitions d’état et la gestion des interruptions. Pour les ingénieurs, négliger ces diagrammes revient à construire un pont sans calculer les limites de charge. Ce guide explore l’anatomie, l’application et la nécessité critique des diagrammes de timing pour assurer une fiabilité robuste du logiciel embarqué.
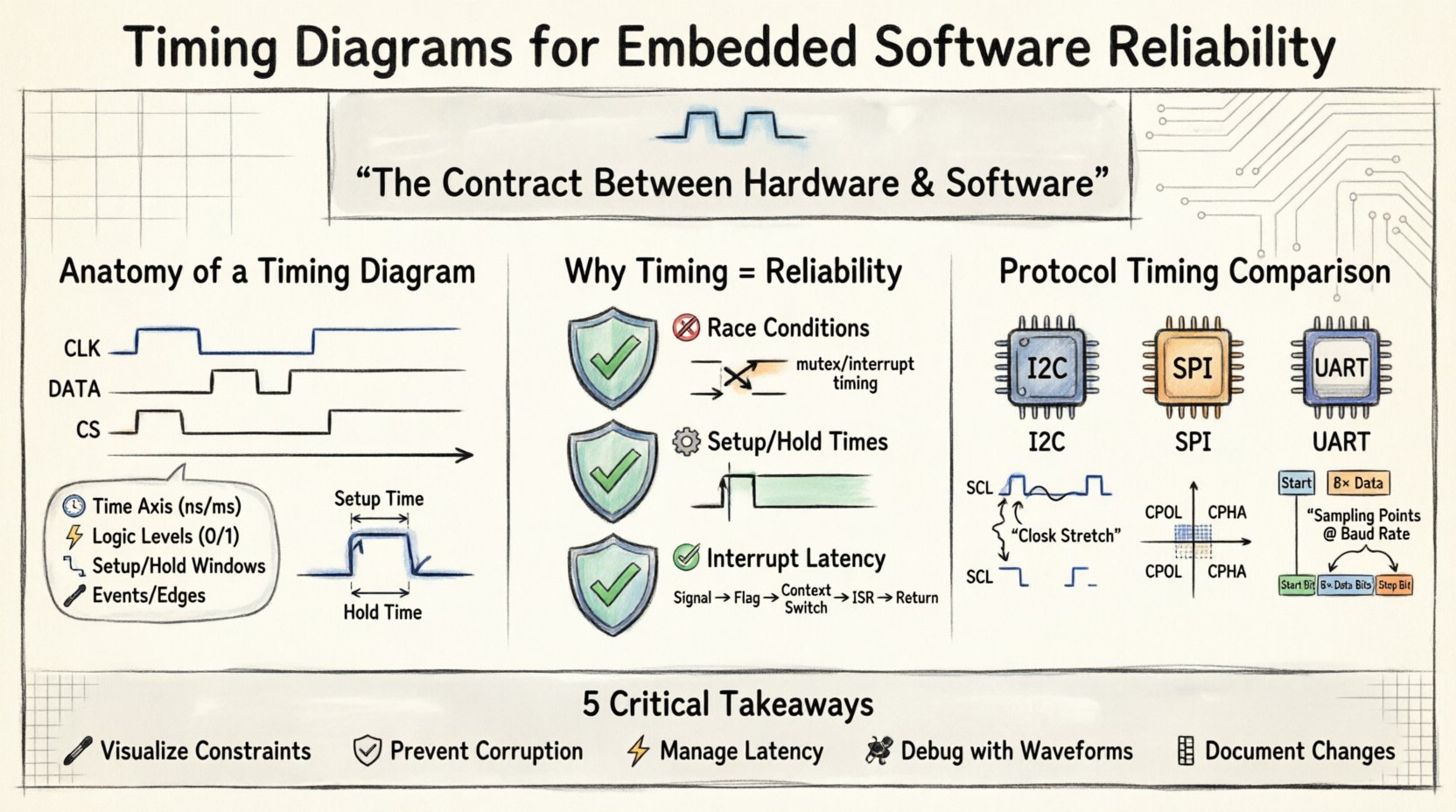
🧩 L’anatomie d’un diagramme de timing
Avant d’aborder les implications liées à la fiabilité, il est essentiel de comprendre les composants qui constituent un diagramme de timing. Ces représentations visuelles cartographient les états logiques des signaux par rapport à un axe temporel. Elles constituent le langage utilisé pour communiquer les exigences temporelles entre les architectes système, les concepteurs matériels et les développeurs logiciels.
- Lignes de signal :Les lignes horizontales représentent des signaux individuels, tels que des horloges (CLK), des lignes de données (SDA, SCL) ou des broches de contrôle (CS, RD, WR).
- Axe temporel :La dimension horizontale indique le passage du temps. Les unités varient de nanosecondes (ns) pour les bus série à haute vitesse à millisecondes (ms) pour les séquences de gestion de l’alimentation.
- Niveaux logiques :Les états verticaux représentent des valeurs binaires, généralement Haute (1/VCC) ou Basse (0/GND). Les transitions sont indiquées par des fronts montants ou descendants.
- Événements :Des actions spécifiques, telles qu’une impulsion d’horloge ou une transition de données, sont marquées pour montrer les dépendances.
- Temps de préparation et temps de maintien :Des fenêtres critiques avant et après un front d’horloge où les données doivent rester stables pour être lues correctement.
Lorsque ces éléments sont correctement organisés, ils révèlent le budget de timing disponible pour l’exécution du logiciel. Ils mettent en évidence les goulets d’étranglement où le processeur doit attendre le matériel externe, souvent appelés arbitrage de bus ou boucles d’interrogation.
⚙️ Pourquoi les diagrammes de timing définissent la fiabilité
La fiabilité du logiciel embarqué est synonyme de déterminisme. Le système doit se comporter de manière identique dans les mêmes conditions, à chaque fois. Les diagrammes de timing fournissent la base pour vérifier ce déterminisme. Sans eux, le logiciel est écrit dans un vide, ignorant la réalité physique de la propagation des signaux et de la synchronisation des horloges.
1. Prévention des conditions de course
Une condition de course se produit lorsque le comportement du système dépend du timing relatif des événements. Dans un environnement multi-thread ou piloté par des interruptions, deux tâches pourraient tenter d’accéder au même ressource simultanément. Un diagramme de timing clarifie la séquence des opérations.
- Scénario :Une routine de service d’interruption (ISR) met à jour une variable tandis que la boucle principale la lit.
- Observation du diagramme :Le diagramme montre la fenêtre d’exécution de l’ISR par rapport au cycle de la boucle principale.
- Résolution :Les ingénieurs peuvent implémenter des mutex ou désactiver les interruptions pendant des durées spécifiques, garantissant que la variable ne soit pas modifiée pendant sa lecture.
2. Gestion des temps de préparation et de maintien
Les microcontrôleurs et les périphériques ont des exigences électriques strictes. Le temps de préparation est le temps minimal pendant lequel un signal doit rester stable avant un front d’horloge. Le temps de maintien est le temps minimal pendant lequel il doit rester stable après le front.
Si le logiciel configure une broche trop rapidement après une transition d’horloge, le périphérique pourrait capturer des données incorrectes. Les diagrammes de timing cartographient explicitement ces fenêtres. Ils indiquent pendant combien de temps le logiciel doit attendre entre la configuration d’une ligne de contrôle et le basculement de l’horloge. Ignorer ces contraintes entraîne des pannes intermittentes, particulièrement difficiles à reproduire.
3. Définition de la latence d’interruption
Dans les systèmes temps réel, le temps écoulé entre la survenue d’un événement et la réponse du logiciel est critique. Les diagrammes temporels illustrent la chaîne de latence d’interruption :
- Arrivée du signal à la broche.
- Détection du périphérique et réglage du drapeau.
- Changement de contexte du CPU (enregistrement des registres).
- Exécution du service d’interruption (ISR).
- Retour au contexte principal.
En visualisant cette chaîne, les développeurs peuvent calculer la latence maximale. Si la latence dépasse l’intervalle entre les paquets de données entrants, des débordements de tampon se produisent. Le diagramme met en évidence les points où une optimisation est nécessaire, que ce soit dans la configuration matérielle ou les niveaux de priorité logicielle.
📊 Analyse des protocoles : I2C, SPI et UART
Les protocoles de communication sont la charpente des communications embarquées. Chacun présente des exigences temporelles distinctes qui doivent être respectées pour garantir l’intégrité des données. Le tableau suivant compare les interfaces sérielles courantes, en mettant en évidence leurs caractéristiques temporelles.
| Protocole | Type | Contrainte temporelle clé | Risque de fiabilité |
|---|---|---|---|
| I2C | Synchronisé, demi-duplex | Allongement de l’horloge (durée de basculement SCL à bas) | Délais d’attente d’ACK, blocage du bus |
| SPI | Synchronisé, plein-duplex | Polarité et phase de l’horloge (CPOL/CPHA) | Désalignement de l’arête d’échantillonnage, perte de données |
| UART | Asynchrone | Précision du débit et points d’échantillonnage | Erreurs de trame, glissement de bits |
Approfondissement : Allongement de l’horloge I2C
Dans I2C, un périphérique esclave peut maintenir la ligne d’horloge à bas pour ralentir la communication. Cela s’appelle l’allongement de l’horloge. Si le maître s’attend à ce que l’horloge revienne à haut dans une fenêtre spécifique, mais que l’esclave prend plus de temps, le maître pourrait expirer. Un diagramme temporel montre la période basse de la ligne SCL. Le pilote logiciel doit être conçu pour prendre en compte des délais variables, plutôt que de supposer une vitesse d’horloge fixe.
Approfondissement : Alignement de phase SPI
Le SPI repose sur des fronts d’horloge précis pour échantillonner les données. Selon le mode (CPOL/CPHA), les données sont échantillonnées sur le front montant ou descendant. Si le logiciel écrit dans le registre à décalage trop tôt ou trop tard par rapport au basculement de l’horloge, le byte reçu sera corrompu. Les diagrammes temporels visualisent la relation entre le front d’horloge et la fenêtre de données valides.
🔍 Débogage et intégrité du signal
Lorsqu’un système échoue, la cause fondamentale est souvent liée au timing. Les analyseurs logiques et les oscilloscopes captent les formes d’onde réelles, qui sont ensuite comparées aux diagrammes de timing attendus. Ce processus valide la conception et identifie les écarts.
1. Identification du décalage
Le décalage fait référence à la différence entre les temps d’arrivée des signaux sur des bus parallèles. Dans les interfaces à haute vitesse, si l’horloge arrive au récepteur avant les données, des violations de configuration se produisent. Les diagrammes de timing permettent aux ingénieurs de mesurer ce décalage. Si ce décalage dépasse la marge, le système devient instable à des fréquences plus élevées.
2. Détection des parasites
Les parasites sont des pics transitoires qui peuvent déclencher des interruptions erronées ou des bascules. Un diagramme de timing montrant une transition propre peut sembler parfait en simulation, mais révéler des pics de bruit en réalité. En capturant la forme d’onde, les ingénieurs peuvent ajouter une logique d’anti-rebond en logiciel ou des composants filtrants en matériel.
3. Analyse du séquençage d’alimentation
Les systèmes embarqués ont souvent plusieurs domaines de tension. Allumer une périphérie avant que la logique principale ne soit prête peut provoquer un verrouillage ou des états indéfinis. Les diagrammes de timing du séquençage d’alimentation définissent le délai minimal entre l’activation du rail d’alimentation et l’activation de l’horloge. Les pilotes logiciels doivent respecter ces délais pendant les routines d’initialisation.
🧱 Gestion du croisement de domaines d’horloge
Les systèmes embarqués modernes utilisent souvent plusieurs sources d’horloge. Par exemple, un CPU peut fonctionner à 100 MHz tandis qu’une périphérie de communication fonctionne à 10 MHz. Le transfert de données entre ces domaines crée un problème de croisement de domaine d’horloge (CDC). Les signaux synchronisés à une horloge peuvent apparaître métastables à l’autre.
Un diagramme de timing pour le CDC montre la relation entre le front de l’horloge source et le front de l’horloge destination. Pour atténuer ce problème, le logiciel doit implémenter des circuits de synchronisation ou des protocoles d’échange (comme les signaux Ready/Valid). Le diagramme définit le timing de l’échange : la source affirme Ready, la destination l’échantillonne, puis affirme Valid. Le timing entre ces affirmations doit être exempt de conditions de course.
🛠️ Meilleures pratiques pour l’implémentation
Pour maintenir la fiabilité, les ingénieurs doivent intégrer les diagrammes de timing dans le cycle de développement. Voici des pratiques concrètes pour assurer la cohérence.
- Définir les contraintes tôt : Établir les exigences de timing pendant la phase de spécification. Ne pas attendre que le matériel soit disponible.
- Contrôle de version des diagrammes : Traitez les diagrammes de timing comme du code. Mettez-les à jour lorsque les révisions matérielles modifient les brochages ou les fréquences d’horloge.
- Vérification automatisée : Lorsque c’est possible, utilisez des outils d’analyse statique pour vérifier si le temps d’exécution du code correspond aux fenêtres de timing définies dans les diagrammes.
- Documenter les cas limites : Mettez en évidence des scénarios tels que la tension faible de la batterie ou des températures extrêmes qui pourraient ralentir la propagation des signaux.
- Valider avec le matériel : Les simulations sont utiles, mais l’intégrité des signaux en conditions réelles diffère souvent. Utilisez un analyseur logique pour vérifier que le timing réel correspond au diagramme.
⚡ Priorités des interruptions et timing
Dans les systèmes complexes, plusieurs interruptions peuvent se produire simultanément. Le diagramme de timing de gestion des interruptions montre la hiérarchie de priorité. Les interruptions à haute priorité ne doivent pas être bloquées pendant de longues périodes par des interruptions à faible priorité.
Prenons un système critique pour la sécurité surveillant un moteur. Si une tâche de journalisation à faible priorité retient le CPU, l’interruption de protection du moteur pourrait être retardée. Le diagramme de timing visualise le temps maximum de blocage des interruptions. Cela informe la décision sur l’utilisation de priorités matérielles ou de stratégies de masquage logiciel.
🔄 DMA et timing d’accès à la mémoire
L’accès direct à la mémoire (DMA) permet aux périphériques de transférer des données sans intervention du CPU. Cependant, cela introduit une contention sur le bus. Lorsque le CPU et le DMA accèdent tous deux à la mémoire, la logique d’arbitrage détermine qui obtient l’accès en premier.
Un diagramme de timing pour le DMA montre les signaux de demande de bus (BRQ) et de concession de bus (BG). Si le logiciel s’attend à ce que les données soient disponibles immédiatement après un transfert DMA, mais que le bus est occupé par une autre opération, la lecture échouera. Comprendre ce timing d’arbitrage du bus empêche les conditions de course dans les tampons de données.
📝 Documentation et maintenance
Les diagrammes de timing sont des documents vivants. Au fur et à mesure que le micrologiciel évolue, les exigences de timing peuvent changer. Par exemple, l’ajout d’une nouvelle fonctionnalité pourrait augmenter la latence des interruptions, nécessitant un changement dans le timing du protocole de communication.
Une documentation efficace inclut :
- Gestion des versions : Chaque schéma doit comporter un numéro de révision lié à la version du firmware.
- Points de référence : Indiquez clairement où commence l’axe du temps (par exemple, Réinitialisation au démarrage).
- Remarques sur la variabilité : Précisez si le timing est au pire cas ou typique. Les tolérances matérielles signifient que le timing est rarement exact.
Le maintien de cette documentation garantit que les ingénieurs futurs comprennent les contraintes sans avoir à reverse-ingénier le code. Cela réduit le risque d’introduire des régressions lors des mises à jour.
🚀 Considérations futures
À mesure que les systèmes embarqués deviennent plus complexes, l’analyse du timing gagne en importance. Les processeurs multi-cœurs introduisent des problèmes de synchronisation du cache. Les protocoles sans fil ajoutent une latence variable en raison des interférences. Les diagrammes de timing devront évoluer pour représenter ces éléments probabilistes aux côtés des éléments déterministes.
Pour l’instant, le principe fondamental reste le même : le temps est une ressource qu’il faut gérer. En traitant les diagrammes de timing comme un élément fondamental du design, les équipes peuvent construire des systèmes qui ne sont pas seulement fonctionnels, mais fiables sous contrainte.
🏁 Résumé des facteurs critiques
Pour résumer, la fiabilité du logiciel embarqué est étroitement liée à la compréhension et à la gestion du timing. Les points clés sont les suivants :
- Visualisation des contraintes :Les diagrammes de timing traduisent les spécifications électriques en limites d’exécution logicielle.
- Prévention de la corruption des données :Les temps de setup et de hold empêchent les erreurs logiques dans les périphériques.
- Gestion de la latence :Le timing des interruptions et du DMA assure la réactivité en temps réel.
- Outil de débogage :Comparer les diagrammes attendus aux formes d’onde capturées permet d’isoler les pannes matérielles et logicielles.
- Documentation :Le maintien de schémas précis préserve l’intention du design tout au long du cycle de vie du produit.
Lorsque les ingénieurs accordent la priorité à ces relations temporelles, ils réduisent la probabilité de défaillances sur le terrain. Le résultat est un système qui fonctionne de manière cohérente, sûre et efficace. Dans la danse complexe entre le silicium et le code, le diagramme de timing est la partition qui maintient tout en rythme.