Dans le monde complexe des systèmes embarqués et de l’architecture des objets connectés (IoT), le temps n’est pas simplement une mesure ; c’est une contrainte fondamentale qui détermine la stabilité du système. Lorsque plusieurs threads ou interruptions tentent d’accéder simultanément à des ressources partagées, le risque de condition de course apparaît. Ce guide propose une analyse technique de la manière de diagnostiquer de tels problèmes de synchronisation à l’aide de diagrammes temporels. Nous explorerons les mécanismes d’exécution concurrente, analyserons les transitions de signaux et identifierons précisément le moment où la logique s’écarte du comportement attendu.
🧩 Comprendre la concurrence dans les systèmes embarqués
Les appareils IoT fonctionnent souvent sous des contraintes strictes en matière de puissance et de traitement. Pour maximiser l’efficacité, les développeurs mettent fréquemment en œuvre des processus concurrents. Cela signifie que l’unité centrale de traitement (CPU) gère plusieurs tâches, telles que le sondage des capteurs, la transmission réseau et le contrôle des actionneurs, comme s’elles se produisaient simultanément. Toutefois, la véritable parallélisation est rare dans les microcontrôleurs à cœur unique. En réalité, le changement rapide de contexte crée l’illusion de simultanéité.
- Mémoire partagée :Variables accessibles à la fois par une routine de service d’interruption (ISR) et par la boucle principale.
- Périphériques matériels :Registres utilisés pour les communications UART, SPI ou I2C.
- Machine à états :Logique qui évolue en fonction de déclencheurs externes.
Lorsque ces éléments interagissent sans primitives de synchronisation appropriées, l’état du système devient non déterministe. Une condition de course survient lorsque le résultat d’un processus dépend du timing relatif d’événements qui ne sont pas garantis pour se produire dans un ordre spécifique.
📊 Le rôle des diagrammes temporels dans le débogage 🛠️
Un diagramme temporel est une représentation visuelle des signaux sur un axe temporel défini. Dans le contexte du débogage, il sert d’outil d’analyse forensique. Contrairement à une revue statique du code, un diagramme temporel capte le comportement dynamique de l’interaction entre le matériel et le logiciel. Il permet aux ingénieurs d’observer la latence, le jitter et les fenêtres d’exécution superposées.
Composants clés d’un diagramme temporel
| Composant | Description | Rélevance par rapport aux conditions de course |
|---|---|---|
| Axe temporel | Ligne horizontale représentant la durée (ns, μs, ms) | Établit la séquence des événements |
| Lignes de signal | Lignes verticales représentant des broches ou des variables spécifiques | Montre les états haut/bas ou les changements de données |
| Transitions | Bords où l’état du signal change (montant/descendant) | Indique les points de déclenchement des interruptions |
| Marqueurs de latence | Délais entre le déclenchement et la réponse | Révèle les goulets d’étranglement de traitement |
🏭 Scénario d’étude de cas : Compteur d’énergie intelligent
Considérons un compteur d’énergie IoT conçu pour mesurer les impulsions de tension et de courant. L’appareil doit enregistrer ces impulsions dans une mémoire non volatile tout en transmettant simultanément un paquet récapitulatif vers une passerelle cloud via un module cellulaire. L’architecture du système implique une boucle d’application principale et une interruption matérielle déclenchée par le franchissement d’un seuil de tension.
Spécifications du système
- Microcontrôleur :Processeur basé sur ARM Cortex-M4 32 bits
- Ressource partagée :Une variable compteur de 4 octets en mémoire RAM
- Source d’interruption :Comparateur de tension externe
- Tâche de la boucle principale :Regroupement et transmission périodiques des données
La logique prévue est simple : lorsqu’un pic de tension se produit, l’interruption incrémente le compteur. La boucle principale lit le compteur, transmet sa valeur, puis le réinitialise à zéro. En conditions normales de charge, cela fonctionne. Toutefois, en conditions de forte charge, une corruption des données survient.
📈 Analyse du flux de signal
Pour diagnostiquer le problème, nous établissons un diagramme temporel axé sur l’interaction entre le service d’interruption (ISR) et la boucle principale. Le diagramme visualise le flux d’exécution du CPU, l’état du signal du compteur partagé et l’état du bus de données périphérique.
Phase 1 : Le cycle Lecture-Modification-Écriture
Le cœur de la condition de course réside dans la séquence Lecture-Modification-Écriture (RMW). Cette opération n’est pas atomique sur de nombreuses architectures. Elle comporte trois étapes distinctes :
- Lecture :Le CPU récupère la valeur actuelle depuis la mémoire.
- Modification :Le CPU ajoute un à la valeur du registre.
- Écriture :Le CPU stocke la nouvelle valeur de retour dans la mémoire.
Si une interruption survient entre l’étape 1 et l’étape 3, l’intégrité des données est compromise. Examinons la représentation du diagramme temporel de cet événement.
Visualisation du diagramme temporel
| Temps (μs) | Boucle principale | ISR | Valeur du compteur partagé |
|---|---|---|---|
| 0 | Lire le compteur (Valeur : 10) | Inactif | 10 |
| 2 | Le registre contient 10 | Interruption déclenchée | 10 |
| 5 | Modifier (10 + 1 = 11) | Lire le compteur (Valeur : 10) | 10 |
| 8 | Interruption en attente | Modifier (10 + 1 = 11) | 10 |
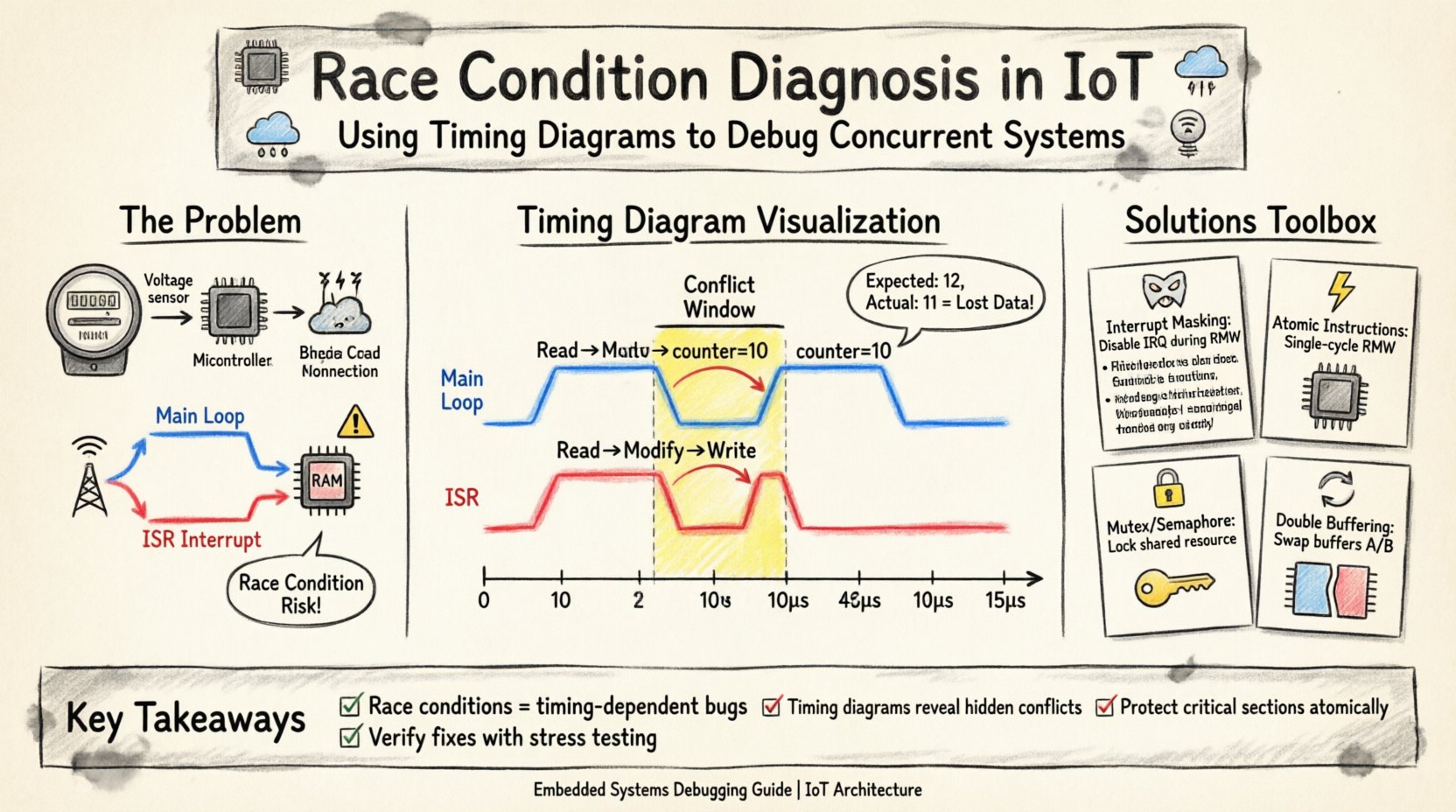
| 10 | Écrire (11) | Écrire (11) | 11 |
| 12 | Réinitialiser le compteur (0) | Retour à l’interruption | 0 |
| 15 | Fin du cycle | Retour à la boucle principale | 0 |
Remarquez l’écart dans la valeur finale. À la fois la boucle principale et le gestionnaire d’interruption lisent la valeur 10. Les deux ajoutent un, ce qui donne 11. La boucle principale écrit 11. Le gestionnaire d’interruption écrase cela par 11. Le résultat net est un comptage de 11, alors qu’il devrait être 12. L’impulsion détectée par le gestionnaire d’interruption a été effectivement perdue parce que la boucle principale était en cours de traitement du comptage précédent.
🔍 Identification de la fenêtre de conflit
Le diagramme temporel rend la fenêtre de conflit visible. Il s’agit de l’intervalle entre la lecture de la variable par la boucle principale et l’écriture de la nouvelle valeur. Dans cette architecture spécifique, le cycle dure environ 8 microsecondes. La latence d’interruption doit être inférieure à cette fenêtre pour que la condition de course se produise.
Facteurs influençant la fenêtre
- Fréquence d’horloge : Des fréquences plus élevées réduisent le temps physique du cycle RMW.
- Latence de mémoire :Les états d’attente dans la SRAM ou la mémoire Flash peuvent prolonger les temps de lecture/écriture.
- Optimisations du compilateur :L’inlining ou l’allocation de registres peut modifier le timing des instructions.
- Priorité d’interruption : Si la priorité d’interruption est inférieure à une section critique dans la boucle principale, la condition de course peut être masquée.
En mesurant les cycles d’horloge réels à l’aide d’un analyseur logique ou d’un moniteur de performance intégré, les ingénieurs peuvent calculer la fenêtre d’exposition exacte. Ces données sont essentielles pour déterminer si une correction logicielle simple est viable ou si une intervention matérielle est nécessaire.
🛡️ Stratégies de résolution
Une fois que la condition de course est confirmée par l’analyse temporelle, des modifications architecturales spécifiques sont nécessaires. L’objectif est de garantir que la section critique (l’opération RMW) soit exécutée de manière atomique ou protégée contre les interruptions.
1. Masquage des interruptions
L’approche la plus directe consiste à désactiver les interruptions pendant la section critique. Cela garantit qu’aucun ISR ne peut interrompre la boucle principale pendant qu’elle met à jour la variable partagée.
- Implémentation : Utiliser des instructions en assembleur pour effacer le drapeau d’activation des interruptions avant la lecture et le réactiver après l’écriture.
- Avantages :Garantit l’atomicité sans structures de données complexes.
- Inconvénients : Augmente la latence des interruptions pour tous les autres périphériques. Les interruptions à haute priorité peuvent être retardées, affectant les performances en temps réel.
2. Instructions atomiques
Les processeurs modernes fournissent souvent un support matériel pour les opérations atomiques. Ces instructions effectuent la séquence Lecture-Modification-Écriture en un seul cycle machine indivisible.
- Implémentation : Utiliser des fonctions de bibliothèque ou des intrinsèques qui correspondent aux instructions atomiques de comparaison-échange (CAS) ou d’obtention-ajout.
- Avantages : Surcharge de performance minimale ; ne nécessite pas la désactivation des interruptions globales.
- Inconvénients : Dépendance matérielle ; non disponible sur tous les microcontrôleurs anciens.
3. Verrouillage logiciel (mutex/semaphore)
Pour des ressources partagées plus complexes, telles qu’un tampon de communication, un mécanisme de verrouillage est nécessaire. Cela garantit qu’un seul thread ou processus accède à la ressource à la fois.
- Implémentation : Un drapeau en mémoire qui indique que la ressource est occupée. La boucle principale vérifie le drapeau ; le gestionnaire d’interruption vérifie le drapeau avant d’essayer d’accéder à la ressource.
- Avantages :Flexible ; permet la priorisation des tâches.
- Inconvénients :Introduit un surcoût de changement de contexte et un risque de blocage si ce n’est pas correctement géré.
4. Double tamponnage
Dans les scénarios de transmission de données, le double tamponnage peut éliminer la nécessité de synchronisation pendant la phase d’écriture. La boucle principale écrit dans le tampon A tandis que le gestionnaire d’interruption lit dans le tampon B.
- Implémentation :Maintenir deux régions mémoire distinctes. Échanger les pointeurs entre elles lorsque un bloc complet est prêt.
- Avantages :Empêche la corruption des données pendant la transmission ; déconnecte la production de la consommation.
- Inconvénients :Double la consommation de mémoire ; nécessite une gestion soigneuse des pointeurs.
🔄 Vérification et test
Après application d’une correction, le diagramme de temporisation doit être régénéré pour vérifier la solution. L’objectif est de constater que la superposition entre les sections critiques de la boucle principale et du gestionnaire d’interruption a été éliminée.
Protocole de test
- Test de charge :Maximiser la fréquence des interruptions et la charge de la boucle principale pour induire des conditions extrêmes.
- Analyse des logs :Comparer la valeur du compteur à une référence connue (par exemple, un générateur d’impulsions externe).
- Capture du signal :Enregistrer le diagramme de temporisation pendant le test de charge pour confirmer l’absence de la fenêtre de conflit.
Si le diagramme de temporisation montre que le gestionnaire d’interruption s’exécute entièrement avant que la boucle principale n’accède à la variable, ou que la variable est verrouillée pendant la transition, la condition de course est résolue.
📝 Pièges courants dans l’analyse de temporisation
Même avec un diagramme de temporisation, les ingénieurs peuvent mal interpréter les données. Plusieurs erreurs courantes peuvent entraîner des faux négatifs ou des faux positifs.
- Ignorer le jitter :La latence du réseau ou le décalage horaire peuvent provoquer un léger décalage des fronts du signal. Un diagramme statique ne peut pas capturer cette variabilité.
- Ignorer les modes d’alimentation : Le processeur peut entrer dans des états d’attente à faible consommation, modifiant le timing des instructions et les temps de réveil des interruptions.
- Variabilité du compilateur : Des niveaux d’optimisation différents (-O0 par rapport à -O2) peuvent réorganiser les instructions, modifiant ainsi le timing exact de la section critique.
- Latence matérielle : Les délais des périphériques (par exemple, le temps de conversion de l’ADC) ne sont souvent pas reflétés dans les diagrammes de timing logiciel, mais influencent l’état global du système.
🚀 Conclusion sur le diagnostic
Diagnostiquer une condition de course exige un changement d’analyse statique du code vers l’observation dynamique des signaux. Le diagramme de timing fournit le contexte nécessaire pour comprendre comment le temps interagit avec la logique dans un environnement concurrent. En cartographiant le flux d’exécution de la boucle principale par rapport au service d’interruption, le moment précis de la corruption des données devient visible.
Une résolution efficace consiste à choisir la stratégie de synchronisation appropriée en fonction des capacités matérielles et des exigences de performance. Que ce soit par des instructions atomiques, le masquage des interruptions ou une refonte architecturale, l’objectif reste le même : garantir que l’état partagé reste cohérent, quelle que soit la chronologie d’exécution.
À mesure que les dispositifs IoT deviennent plus complexes et interconnectés, la marge d’erreur se réduit. Une analyse rigoureuse du timing n’est pas seulement une étape de débogage ; elle constitue un élément essentiel du cycle de développement des systèmes embarqués fiables.